Latest Update for the Trial Robot Scenario Simulator: Smart Agriculture Simulation! New Automatic Harvesting Simulation Functionality with Harvesting Robot Added.
2025.09.09
- ロボットシナリオシミュレータ
Thank you for your continued use of SANEI HYTECHS's trial robot scenario simulator. We have added an automatic harvesting simulation function for smart agriculture to the trial robot scenario simulator. Here, we will introduce the newly added harvesting robot and the automatic harvesting simulation.
Smart Agriculture Simulation! Introduction of New Features in the Trial Robot Scenario Simulator
The following features have been added in this update:
Reproduction of Farm and Harvesting Robot in 3D Space
We have recreated the farm used as an experimental field for our Smart Agriculture Project and developed a 3D model based on the harvesting robot designed for this project. You can simulate not only ground conditions such as farm unevenness but also changes in the harvesting robot’s tire aspect ratio. The ability to simulate by changing the tire aspect ratio is a strength of this simulator, allowing you to experience a unique harvesting simulation.
Reproduction of Farm in Virtual Space
3D Model of the Harvesting Robot
Autonomous Driving and Automatic Harvesting Simulation
Automatic harvesting starts by selecting the start point, collection point, and the number of citrus trees to harvest.
During automatic harvesting, the robot explores routes to avoid obstacles and drives autonomously. You can experience the autonomous driving and automatic harvesting while exploring the optimal route each time a citrus is harvested. In addition, changes in the time required for harvesting can be observed depending on the terrain conditions of the farm and the tires of the harvesting robot, which can be used for efficient harvesting planning.
During automatic harvesting, the robot explores routes to avoid obstacles and drives autonomously. You can experience the autonomous driving and automatic harvesting while exploring the optimal route each time a citrus is harvested. In addition, changes in the time required for harvesting can be observed depending on the terrain conditions of the farm and the tires of the harvesting robot, which can be used for efficient harvesting planning.
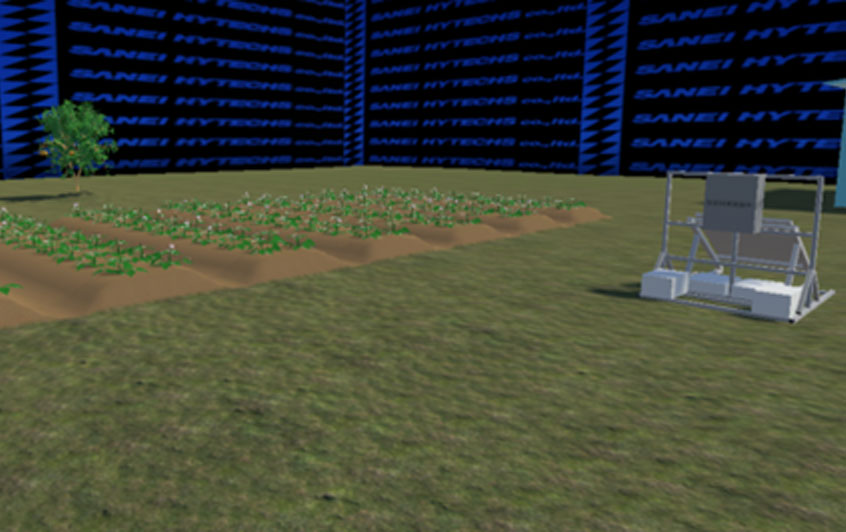
Reproduction of Farm in Virtual Space (3D Farm)
We have reproduced the farm used as an experimental field for our "Smart Agriculture Project" in virtual space (3D Farm). In the 3D farm, we have placed a potato field and five citrus trees. Citrus can be harvested from citrus trees.

Farm in Hamamatsu City (Photo)
3D Farm
3D Farm Potato Field
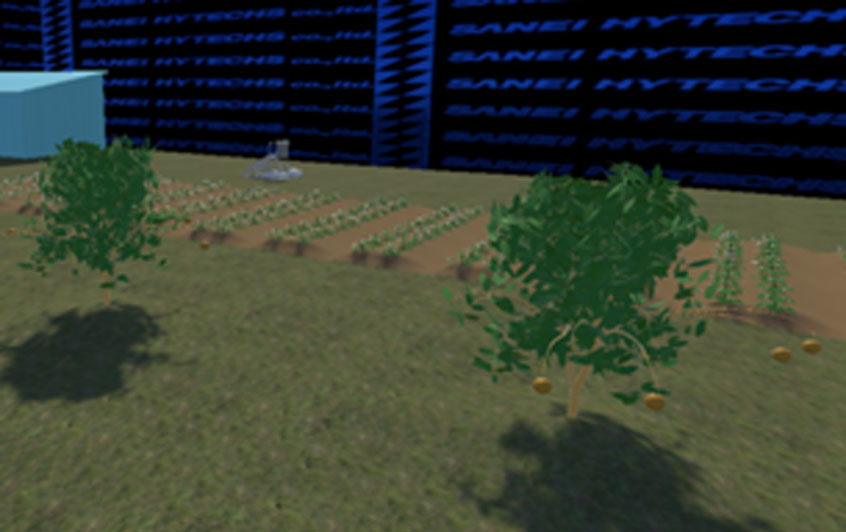
3D Farm Citrus Trees
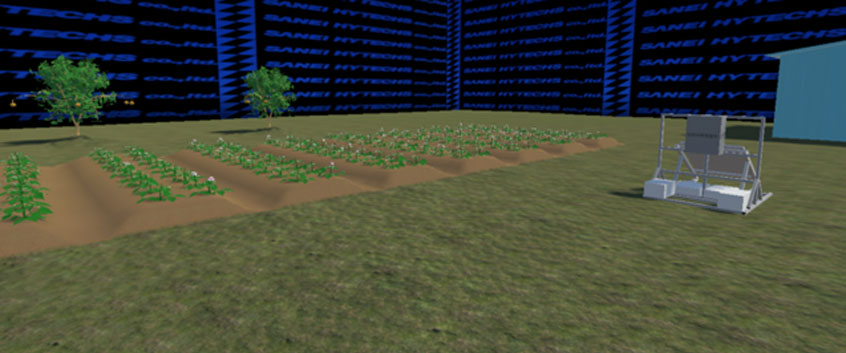
Slope and Unevenness Settings
In the 3D farm, you can change the unevenness and slope of the ground. Three levels of unevenness are available, with higher levels indicating greater unevenness. The slope can be changed to any value, allowing you to change the overall tilt of the farm. The actual farm we reproduced this time does not have such large unevenness or slopes. However, the reproduction that is only possible in virtual space allows us to check the stability of the harvesting robot's driving.

Initial Settings (No Slope / Unevenness Level 1)
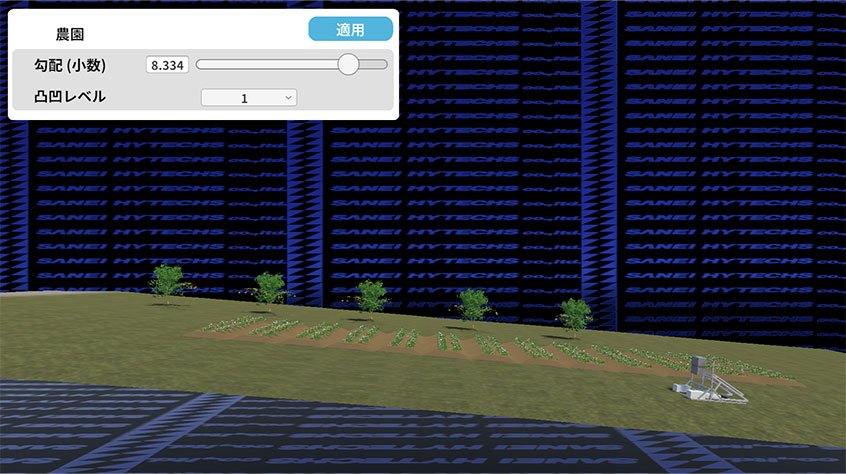
After Slope Setting (With Slope)
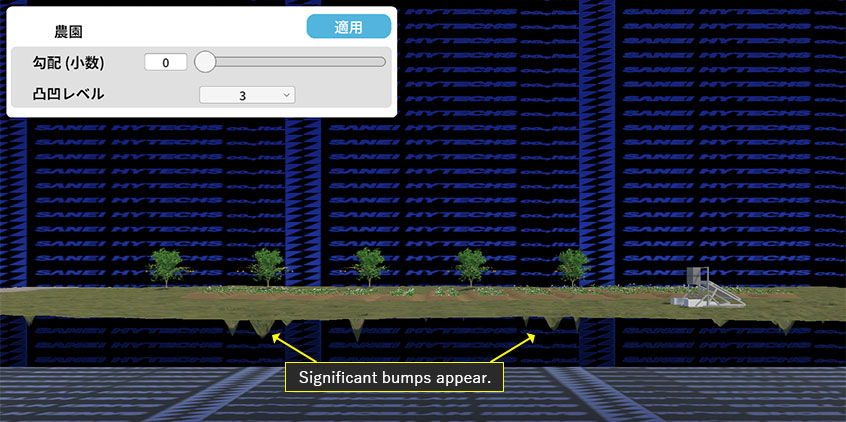
After Unevenness Setting (Unevenness Level 3)
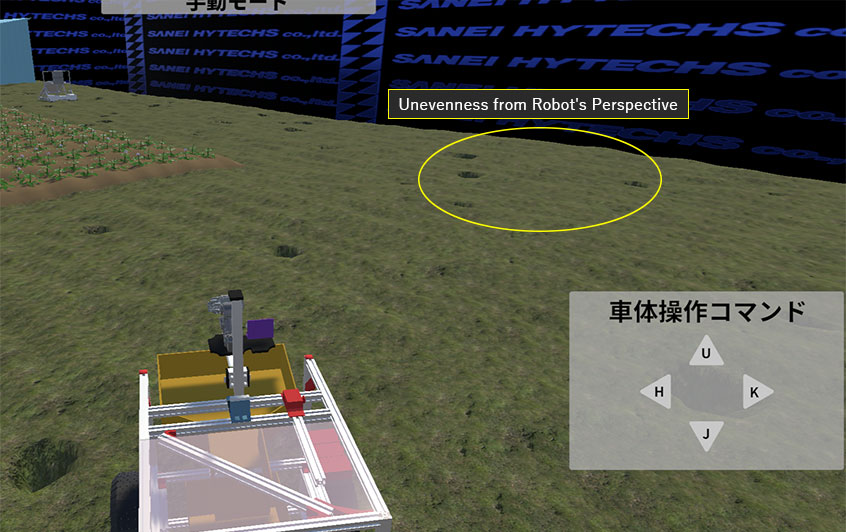
After Unevenness Setting (Unevenness Level 3) Robot View
3D Model of the Harvesting Robot
We have created a 3D model of the harvesting robot developed in our "Smart Agriculture Project." It is equipped with a harvesting robot arm and camera.
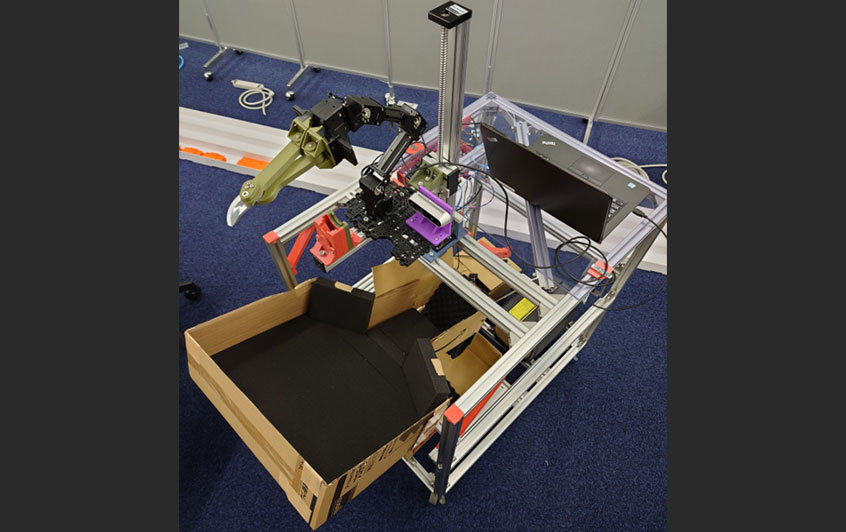
Harvesting Robot (Actual Machine)
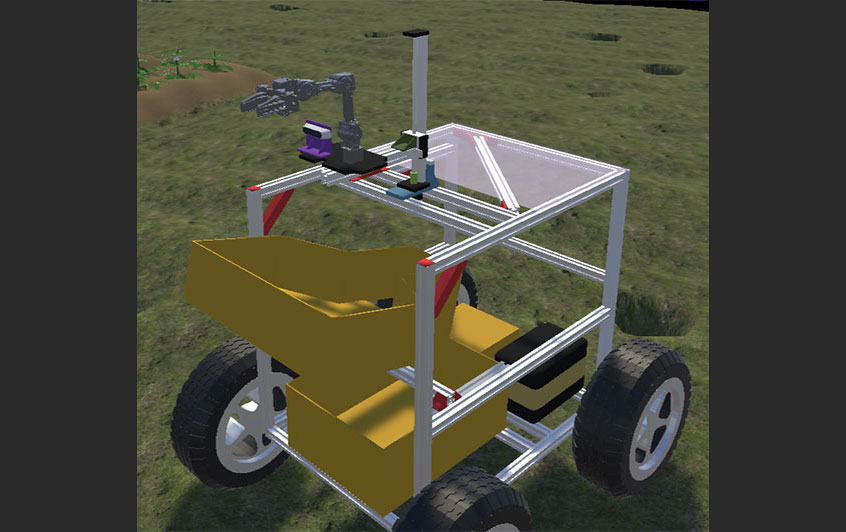
Harvesting Robot (3D Model)
| Camera |
|
|---|---|
| Robot Arm |
|
| Tires |
|
The tire aspect ratio and air pressure can be changed for simulation.
The harvesting robot's tires allow for changes in four settings: aspect ratio, air pressure, wheel width, and diameter.
The strength of this simulator is that it allows for simulations with changes not only in the robot's driving terrain but also in tire and wheel conditions.
The strength of this simulator is that it allows for simulations with changes not only in the robot's driving terrain but also in tire and wheel conditions.

Tire Setting Change (Initial Setting)
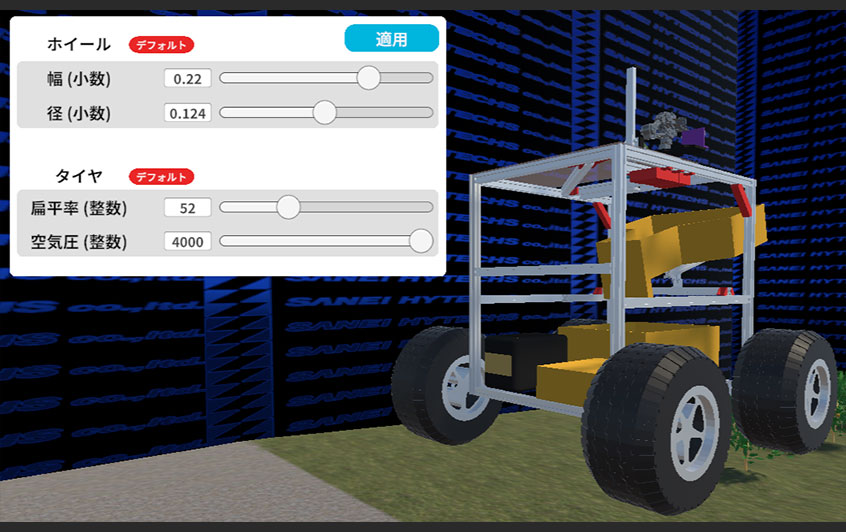
Tire Setting Change (After Setting Change)
Autonomous Driving of the Harvesting Robot in the Farm
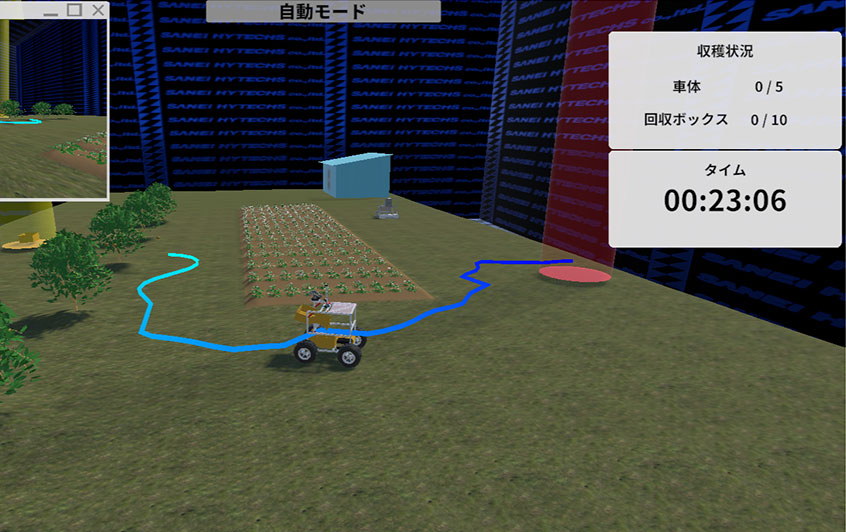
In this trial version, terrain data such as the location of citrus trees and fields are pre-loaded into the simulator. The harvesting robot autonomously navigates, avoiding obstacles such as fields and citrus trees. During automatic harvesting, the robot explores the optimal route to the next citrus after harvesting each one, continuing the harvesting process. For route exploration, we utilize a unique system combining multiple algorithms published in research papers.
Automatic Route Exploration
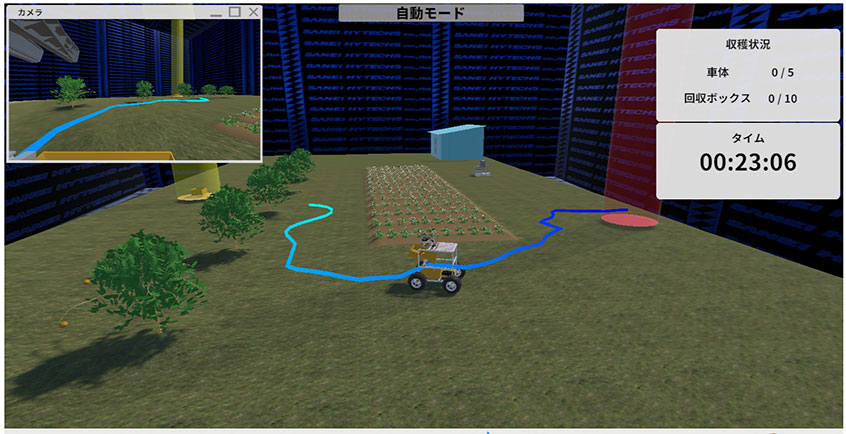
Automatic Citrus Harvesting by the Harvesting Robot
The harvesting robot moves to the collection point and unloads the harvested citrus after harvesting five fruits from each citrus tree. It automatically repeats harvesting and collection at the designated citrus trees until all harvesting is complete.
The camera from the harvesting robot's perspective displays the distance to the citrus, and the numerical color changes from red to white when the distance is suitable for harvesting. Also, when automatic harvesting starts, the estimated time to complete harvesting is measured and displayed on the right side of the screen. The time required for harvesting varies depending on the unevenness and slope of the farmland, and the tire conditions, so please try simulations under various conditions.
The camera from the harvesting robot's perspective displays the distance to the citrus, and the numerical color changes from red to white when the distance is suitable for harvesting. Also, when automatic harvesting starts, the estimated time to complete harvesting is measured and displayed on the right side of the screen. The time required for harvesting varies depending on the unevenness and slope of the farmland, and the tire conditions, so please try simulations under various conditions.
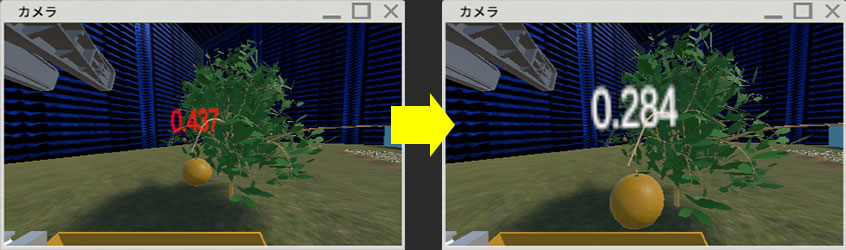
Changes in Distance During Harvesting
We have introduced the simulation function of the harvesting robot newly added to the trial version. The strength of this simulator is that you can simulate not only terrain conditions such as unevenness and slope of farmland, but also change the tire conditions of the harvesting robot. In addition, we have implemented a unique system that combines existing algorithms for route search for autonomous driving. Please experience autonomous driving and automatic harvesting by changing various terrain and tire conditions.
The product version of this simulator is scheduled to be released within fiscal year 2024. In the product version, in addition to expanding the functions of automatic harvesting simulation and drone flight simulation, we plan to implement various additional functions such as communication functions using metaverse functions in stages. Please wait a little longer until the product version is released. We will continue to publish information on this site, so please look forward to it.
The product version of this simulator is scheduled to be released within fiscal year 2024. In the product version, in addition to expanding the functions of automatic harvesting simulation and drone flight simulation, we plan to implement various additional functions such as communication functions using metaverse functions in stages. Please wait a little longer until the product version is released. We will continue to publish information on this site, so please look forward to it.