Smart Agriculture Project
A Smart Agriculture Project, Leveraging Digital Transformation (DX) Technology, Supports the Agricultural Sector.
In addition to ever-evolving agricultural technology, we also expect Digital Transformation (DX) to further enhance efficiency and add value. We are working on a Smart Agriculture Project to provide new value to agriculture by integrating AI, IT, and embedded software technologies.Overview of the Smart Agriculture Project
Our research and development department is dedicated to the "Smart Agriculture Project" with a focus on agriculture.
In this project, we are developing systems designed for smart agriculture. Furthermore, we are conducting on-site trials in two farms, one located in Hamamatsu City, Japan, in collaboration with our partner companies, and the other in Vietnam. In the Hamamatsu City farm, our primary emphasis is on enhancing the efficiency of both orange cultivation and harvesting. Meanwhile, in the Vietnamese farm, we are dedicated to improving the efficiency of cocoa cultivation and harvesting.
The systems being developed in this project include a "Harvesting Robot System" and a "Sensing System for Digitizing Farm Conditions." While we are still in the midst of development, we would like to provide you with an overview of our progress thus far.
In this project, we are developing systems designed for smart agriculture. Furthermore, we are conducting on-site trials in two farms, one located in Hamamatsu City, Japan, in collaboration with our partner companies, and the other in Vietnam. In the Hamamatsu City farm, our primary emphasis is on enhancing the efficiency of both orange cultivation and harvesting. Meanwhile, in the Vietnamese farm, we are dedicated to improving the efficiency of cocoa cultivation and harvesting.
The systems being developed in this project include a "Harvesting Robot System" and a "Sensing System for Digitizing Farm Conditions." While we are still in the midst of development, we would like to provide you with an overview of our progress thus far.
"Robot system" for harvesting
I will introduce the prototype harvesting robot that we are currently developing.
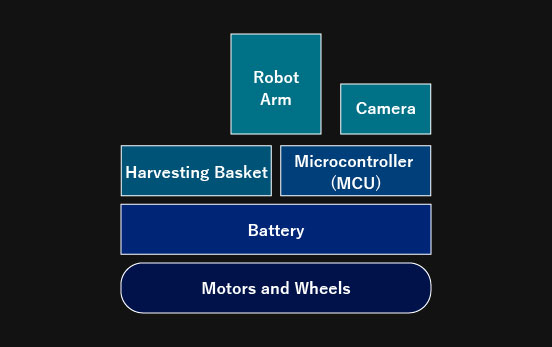
The robot's configuration is as follows:
The robot's configuration is as follows:
Soil Sensor System Configuration Diagram
The main functionalities of the robot consist of two key components: "Autonomous Navigation Capability of the Robot Body" and "Fruit Harvesting Capability with the Robot Arm."
We are actively engaged in the development of the essential technological elements required to achieve these functions.
We are actively engaged in the development of the essential technological elements required to achieve these functions.
Software development for robot control
For the development of control software, we utilize middleware known as ROS (ROS2). ROS is an open-source framework that provides a valuable set of libraries and a publish/subscribe communication system, making it particularly useful for robot development. Furthermore, ROS also offers package management capabilities, which enable better source code reusability and significant reductions in both effort and time in robot development. Our research and development department is actively working on the development of additional functionalities based on the control packages provided, building upon the existing foundation.
The fabrication of the robot's enclosure/casing
The prototype casing of the harvesting robot is constructed with an aluminum frame structure, housing components such as the robot arm, microcontroller, motors, and more. We utilize a 3D printer for the production of necessary components, enabling us to manufacture parts with intricate shapes that are not readily available commercially.
Furthermore, due to the ease of making modifications to parts, leveraging the 3D printer effectively allows us to streamline the development process of the prototype robot efficiently.
Below are photos taken during the operational experiments of the prototype robot conducted at the farm in Hamamatsu.
We successfully used 3D printed parts to create components for attaching scissors to the robot arm, enabling it to cut and collect orange stems effectively.
Furthermore, due to the ease of making modifications to parts, leveraging the 3D printer effectively allows us to streamline the development process of the prototype robot efficiently.
Below are photos taken during the operational experiments of the prototype robot conducted at the farm in Hamamatsu.
We successfully used 3D printed parts to create components for attaching scissors to the robot arm, enabling it to cut and collect orange stems effectively.

The prototype of the harvesting robot.

The use of a robot arm for harvesting oranges.
The development of AI for fruit detection.
To harvest fruits, it is essential to detect and precisely locate the position of the fruits. To achieve this, we are currently developing fruit detection functionality and employing a deep learning method called "You Only Look Once (YOLO)." We are using annotated photos of oranges taken in the farm as our training dataset for the machine learning model.
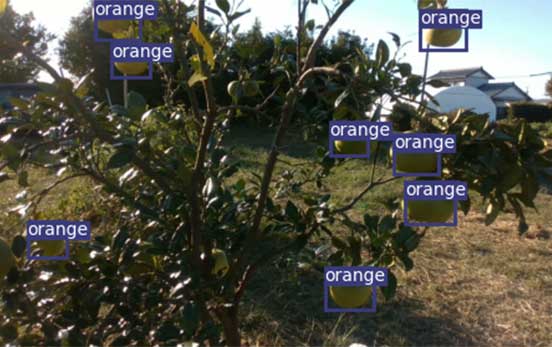
Detecting oranges
The positional information of the detected fruits is acquired using point cloud data collected from stereo cameras and LiDAR. This positional information is shared with the node controlling the robot arm and is utilized for the position control of the robot arm.
A 'sensing system' that converts farm conditions into data
In the context of using robots for harvesting and farm management, the digitalization of farm data is considered highly effective. To demonstrate this effectiveness, we are working on the development of an IoT system that shares farm data collected from various sensors through communication base stations. Here, we will introduce three key elements from the technological development of this IoT system.
Farm Mapping Using GNSS
Crop management and the implementation of robot systems require access to farm map data.
Therefore, we are actively working on the development of a system that creates farm maps using location information. Our future goal is to establish a comprehensive system that integrates maps and the current locations of various devices.
For obtaining location information, we use GNSS (Global Navigation Satellite System) like GPS.
Additionally, to enhance accuracy, we are also utilizing the Real-Time Kinematic (RTK) GNSS, a precise positioning method. We have developed prototype programs and conducted tests in both Hamamatsu and the farm in Vietnam to verify the accuracy and functionality. During the tests, we walked through the farms, performed registration actions near the target objects, and created maps in the vicinity. We were able to obtain high-precision data at the farm in Hamamatsu. However, in the farm in Vietnam, we faced challenges due to low signal strength and situations where RTK-GNSS couldn't be utilized, making it difficult to obtain data with sufficient location accuracy. In the future, we will focus on improving location accuracy in international locations and work on developing an integrated IoT system that utilizes GIS (Geographic Information System).
Therefore, we are actively working on the development of a system that creates farm maps using location information. Our future goal is to establish a comprehensive system that integrates maps and the current locations of various devices.
For obtaining location information, we use GNSS (Global Navigation Satellite System) like GPS.
Additionally, to enhance accuracy, we are also utilizing the Real-Time Kinematic (RTK) GNSS, a precise positioning method. We have developed prototype programs and conducted tests in both Hamamatsu and the farm in Vietnam to verify the accuracy and functionality. During the tests, we walked through the farms, performed registration actions near the target objects, and created maps in the vicinity. We were able to obtain high-precision data at the farm in Hamamatsu. However, in the farm in Vietnam, we faced challenges due to low signal strength and situations where RTK-GNSS couldn't be utilized, making it difficult to obtain data with sufficient location accuracy. In the future, we will focus on improving location accuracy in international locations and work on developing an integrated IoT system that utilizes GIS (Geographic Information System).
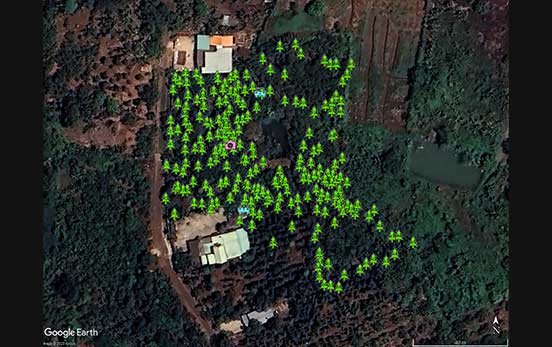
Mapping of cocoa trees.
Automatic Imaging Camera Module
To enable remote monitoring of crop growth, we are in the process of building a system that conducts periodic photo capture. One of the significant challenges when installing electronic equipment in farms is ensuring a reliable power source. Since many farms lack a dedicated power supply, we need to develop energy-efficient modules capable of long-term operation, often powered by mobile batteries or rechargeable batteries. Furthermore, due to outdoor installation, it's essential to ensure weather resistance, including waterproofing and durability. We are progressing with the development of camera modules that meet these requirements, and we have installed prototypes in a cocoa farm in Vietnam. They are currently operational.


Camera modules for capturing periodic images of cocoa trees.
Soil Sensor System
We have developed a soil sensor system to measure the soil conditions of the orange trees in the farm in Hamamatsu. We have currently installed this system on-site and are conducting trial operations. While there's no guarantee of obtaining valuable information from soil conditions, we believe that the first step is to digitize and analyze the data. We consider this a crucial mindset in the research and development related to Digital Transformation (DX) and are actively taking on this challenge. The soil sensor system currently under development is designed to periodically collect soil data and store it in a cloud-based database server.
We are using sensors from Qinlorgon to obtain soil data, including soil temperature, soil moisture, and soil conductivity. We utilize Raspberry Pi Zero for controlling the sensors.
We are using sensors from Qinlorgon to obtain soil data, including soil temperature, soil moisture, and soil conductivity. We utilize Raspberry Pi Zero for controlling the sensors.
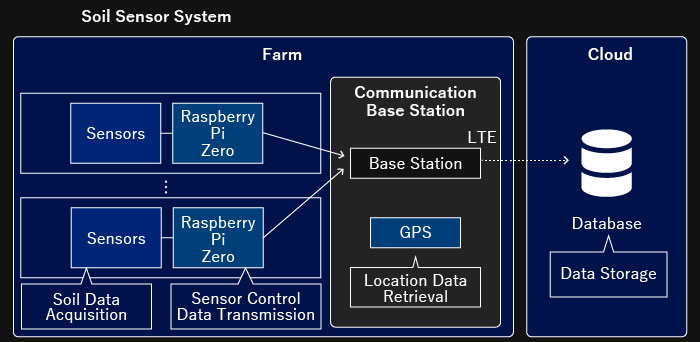
Soil Sensor System Configuration Diagram
Communication from the sensors
We use the RS485 serial communication standard for communication with the sensors we are using. To facilitate communication between the Raspberry Pi Zero and the sensors, we have inserted a driver for protocol conversion, allowing communication with the sensors via UART from the GPIO. Furthermore, we control the data retrieval from the sensors using Python programming.Power Supply
In outdoor IoT systems, ensuring a reliable power supply is a crucial challenge. Unlike indoor setups, power outlets are not readily available, and even with the installation of solar panels, it can be challenging to run power cables to IoT devices. Similar challenges arise in the case of soil sensor systems, which is why we have designed the system to be energy-efficient and battery-powered. One of the strategies for reducing power consumption is intermittently operating the entire system. For measuring soil conditions, we have determined that it is sufficient to do so several times a day. As a result, we have implemented a feature that operates for approximately 5 minutes every 6 hours. We are utilizing Indoor Corgi's Raspberry Pi power management module, "RPZ-PowerMGR," for this feature.Communication Base Station
To transmit data collected from automatic photography camera modules and soil sensor systems to a cloud-based database, a communication base station was set up at the Hamamatsu farm. This base station consists of a power supply from solar panels, a WiFi router for communicating with each sensor, and an LTE communication module for communication with servers in the cloud. The enclosure is designed to be safe and robust to prevent it from falling over due to the wind. It is also anchored to the ground using stakes or appropriate-weighted counterbalances. This base station has been operating reliably for at least over a year.

Communication Base Station
As previously introduced, we are engaged in various initiatives related to smart agriculture. We will continue to develop and contribute to the improvement of agriculture's efficiency in the future. Furthermore, we will apply the robot and IoT technologies acquired in the smart agriculture project to fields beyond agriculture and offer them to our customers.
About Notation for ROS
The official notation for ROS 2 is "ROS 2" (with a space). However, in Japanese, it is often written as "ROS2" (without a space) for readability. Therefore, this site also uses the "ROS2" notation.