[Exhibiting at Geo-ten 2026] Human Flow and Point Cloud Data Utilization and Analysis Technology
2026.04.21
- Event
This article provides an overview of the technologies we plan to exhibit at Geo-ten 2026.
The utilization of human flow data (location information) and point cloud data is a technology that digitizes the movement and shape of real space and uses it for simulation and analysis. This article explains specific application methods in robot development and smart city fields, and approaches to solving challenges faced in the field. We will introduce technologies that will provide concrete hints for data utilization for everyone from system developers at manufacturers to local government officials promoting urban planning and smart cities.
The utilization of human flow data (location information) and point cloud data is a technology that digitizes the movement and shape of real space and uses it for simulation and analysis. This article explains specific application methods in robot development and smart city fields, and approaches to solving challenges faced in the field. We will introduce technologies that will provide concrete hints for data utilization for everyone from system developers at manufacturers to local government officials promoting urban planning and smart cities.
The Potential of Human Flow and Point Cloud Data Utilization
The utilization of human flow data (location information) and point cloud data is rapidly advancing in both robot development and urban planning. In the robotics field, there is a demand for improved development efficiency through simulations that closely resemble real-world environments. Meanwhile, in the urban development field, data utilization is progressing towards the realization of smart cities and digital twins.
Advantages and Challenges of Utilizing Human Flow Data and Point Cloud Data
Advantages
- Realistic simulations are possible
Human movement and urban environments can be reproduced - Improved development efficiency
Pre-verification of robots and autonomous driving can be conducted - Data-driven decision-making
Improved accuracy of urban planning and facility placement
Challenges (Disadvantages)
In actual practice, the following challenges are frequently observed:
- Uncertainty about how to utilize human flow data
Location information is acquired, but it cannot be used for analysis or simulation on urban models - Point cloud data processing is resource-intensive
Handling wide-area data leads to memory shortages and slow rendering speeds - Many elements are unnecessary for simulation
Noise such as power lines hinders verification of robots and autonomous driving
Features of Our Technology: Three Key Points to Address Practical Challenges
Transforming Data into a "Usable Format"
Our company provides technology to convert human flow data and point cloud data into a format that can be used in practical applications.
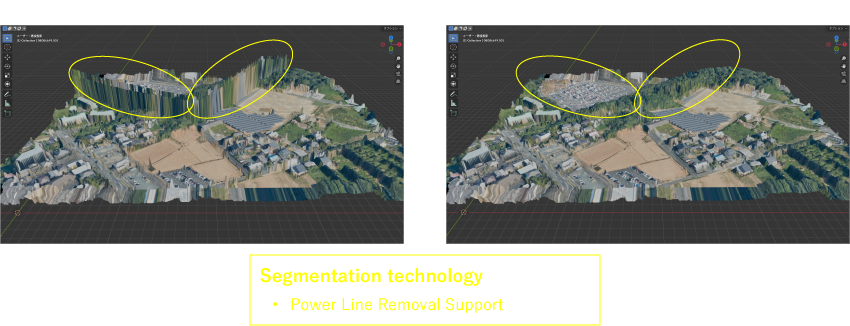
- Spatial Optimization through Segmentation
Removes unnecessary objects such as power lines to generate a space suitable for simulation. - Cloud Sequential Loading (Open World Technology)
Loads only the necessary areas, allowing for smooth handling of even large-scale data. - Integration of Heterogeneous Data
Integrates pedestrian flow data, 3D city models, and robot control to build a simulation environment.
Technical Introduction (Examples of Pedestrian Flow Data and Point Cloud Data Utilization)
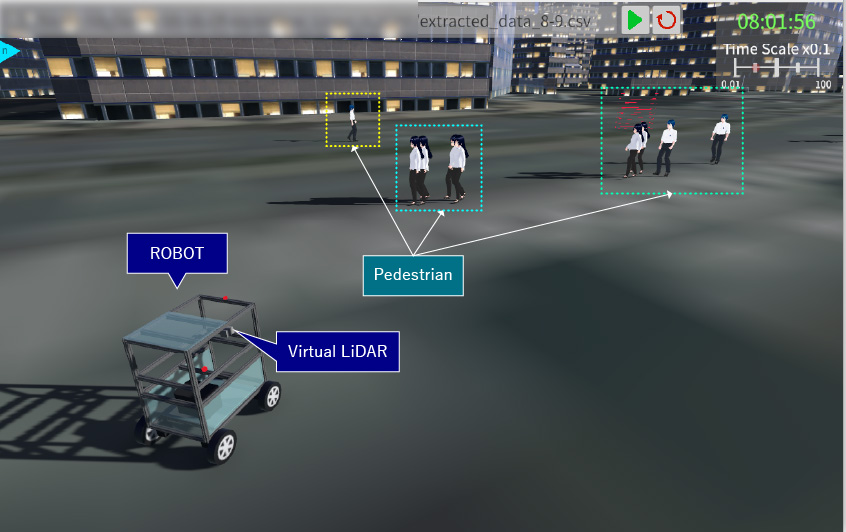
Simulation using Pedestrian Flow Data × ROS2 × Unity
We reflect human flow data into a virtual space built on Unity at a real-time scale, enabling robot control in coordination with ROS2.
This enables the following verifications:
Development under conditions close to the real environment becomes possible, contributing to improved development efficiency.
This enables the following verifications:
- Evaluation of route search algorithms in congested environments
- Navigation design considering distance from people
- Pre-verification of actual machine control logic
Development under conditions close to the real environment becomes possible, contributing to improved development efficiency.
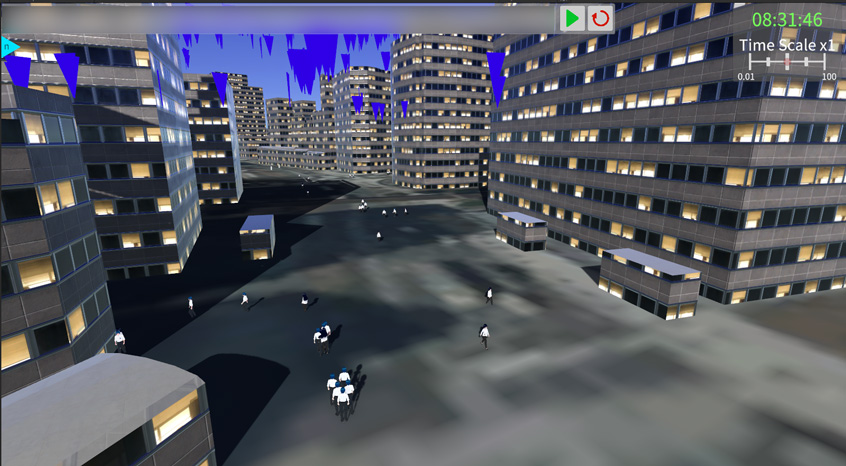
Visualization of Human Flow Data using 3DCG
- Utilizing Project PLATEAU's 3D Urban Area Model
- Reflecting human flow data into a digital space on Unity at a real-time scale.
Robot Development in Integration with ROS2
- Integrating point cloud data acquired from simulated sensors such as LiDAR with ROS2
- Verification of robot behavior to avoid contact with people through point cloud processing
Utilization of Human Flow Data × 3D City Model (PLATEAU)
By overlaying human flow data onto a 3D city model, urban movement is visualized. This enables data-driven urban planning such as:
- Understanding congestion levels
- Analysis of movement patterns
- Consideration of facility placement
Point Cloud Data Analysis and Spatial Generation
Point cloud data is meshed and converted into spaces suitable for various uses.
Furthermore, segmentation enables the following:
Applicable to both robot development and urban simulations.
Furthermore, segmentation enables the following:
- Removal of unwanted objects such as power lines
- Data generation for simulations
Applicable to both robot development and urban simulations.
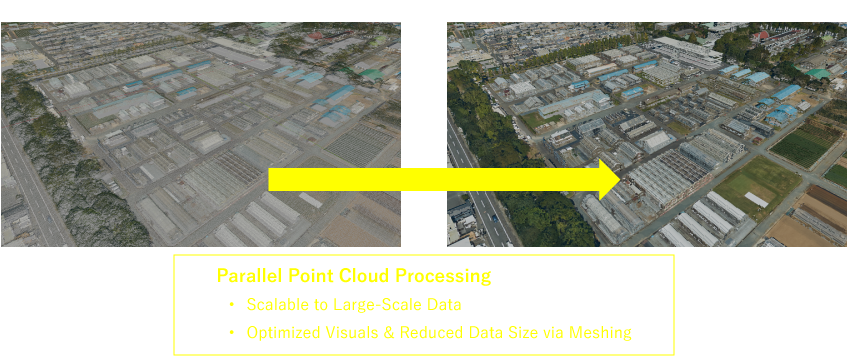
Cloud processing of point cloud data
- Utilizing cloud services to parallelize and accelerate point cloud processing
- Data management of processed point clouds using databases
Open World Viewer
- Sequential downloading from the cloud
- Loading only the required areas to reduce processing loads on local environments.
- Specifying geographic coordinates enables simulation of diverse locations.
Expected Application Scenarios
For Developers
- Robot and Autonomous Driving Simulation
- Algorithm Verification Environment Construction
For Local Governments
- Smart City Initiatives
- Urban Traffic Flow Analysis
- Disaster Prevention Simulation
Learn more about SANEI HYTECHS's 3D technology
The "visualization of human flow data" and "point cloud data analysis" introduced in this article are based on our 3D technology.
SANEI HYTECHS offers a variety of solutions to solve practical problems, including realistic spatial reproduction and high-precision segmentation using 3DCG. These solutions are detailed on the following page.
SANEI HYTECHS offers a variety of solutions to solve practical problems, including realistic spatial reproduction and high-precision segmentation using 3DCG. These solutions are detailed on the following page.
We look forward to seeing you at Geo-ten 2026!
At the venue, you can see demonstrations of simulations combining pedestrian flow data and point cloud data, as well as an open-world viewer.
We offer comprehensive support, from consultations at the technical consideration stage to concrete implementation planning.
We offer comprehensive support, from consultations at the technical consideration stage to concrete implementation planning.
Exhibition Information
| Event | Geo-ten 2026 https://www.geoten.org/ |
|---|---|
| Schedule | 28 April 2026 | 10:00 AM – 5:00 PM |
| Venue | Otemachi Mitsui Hall Otemachi One 3F, 1-2-1 Otemachi, Chiyoda-ku, Tokyo [Booth Number: 23] |
| Exhibition Highlights |
|

Datasets Used and Processing Details
The images on this page are created by processing and integrating the following reliable open data.
The images on this page are created by processing and integrating the following reliable open data.
- Topographic Data: VIRTUAL SHIZUOKA © Shizuoka Prefecture
- Source: https://virtualshizuokaproject.my.canva.site/
- licensed under CC BY 4.0
- Topographic Data (Hamamatsu Station): Partially created using processed GSI Digital Japan Basic Map (Orthophoto) data.
- Source: https://www.gsi.go.jp/
- Licensed under CC BY 4.0:https://creativecommons.org/licenses/by/4.0/
- Topographic Data: 3D City Model (Project PLATEAU) © Ministry of Land, Infrastructure, Transport and Tourism.
- Source: https://www.mlit.go.jp/plateau/
- licensed under CC BY 4.0