スマート農業プロジェクト
農業をDX(デジタルトランスフォーメーション)技術で支援する
農業に関わる技術は日々進歩していますが、DX(デジタルトランスフォーメーション)によりさらなる効率化や高付加価値化が期待されています。当社が保有するAI、IT、組み込みソフトウエアの技術を組み合わせることで農業に新たな価値を提供することを目指し、スマート農業プロジェクトに取り組んでいます。スマート農業プロジェクトの概要
当社研究開発部門では、農園での運用を目標とした「スマート農業プロジェクト」に取り組んでいます。
このプロジェクトでは、スマート農業向けのシステムを開発し、提携する企業さまの浜松市内とベトナムの二つの農園にて実地試験を進めます。浜松市内の農園では、主にみかんの栽培と収穫の効率化に取り組んでいます。ベトナムの農園では、カカオの栽培と収穫の効率化に挑戦しています。
このプロジェクトで開発しているシステムは、「収穫を行うロボットシステム」と「農園の状況をデータ化するセンシングシステム」です。まだ途中段階にありますが、これまでの開発状況についてご紹介します。
このプロジェクトでは、スマート農業向けのシステムを開発し、提携する企業さまの浜松市内とベトナムの二つの農園にて実地試験を進めます。浜松市内の農園では、主にみかんの栽培と収穫の効率化に取り組んでいます。ベトナムの農園では、カカオの栽培と収穫の効率化に挑戦しています。
このプロジェクトで開発しているシステムは、「収穫を行うロボットシステム」と「農園の状況をデータ化するセンシングシステム」です。まだ途中段階にありますが、これまでの開発状況についてご紹介します。
収穫を行うロボットシステム
試作している収穫ロボットについて紹介します。ロボットの構成は次のとおりです。
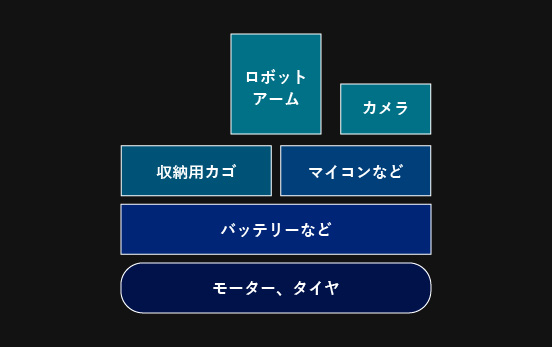
収穫ロボット構成図
主な機能は「ロボット本体の自律走行機能」と「ロボットアームで果実を収穫する機能」の二つです。
当社では、これらの機能を達成するために必要な要素技術の開発に取り組んでいます。
当社では、これらの機能を達成するために必要な要素技術の開発に取り組んでいます。
ロボット制御のソフトウエア開発
制御用ソフトウエアの開発には、ROS(ROS2)というミドルウエアを使用しています。ROSはオープンソースのフレームワークで、ロボット開発において役に立つライブラリ群や、出版購読型(Publish/Subscribe)の通信システムを提供しています。さらに、パッケージ(個々の機能を実現するためのプログラムの集合)の管理機能を備えており、ソースコードの再利用性が高く、ロボット開発における手間と時間を大幅に削減できます。当社の研究開発部門では、提供されている制御用パッケージをベースに、必要な追加機能の開発を行っています。
ロボットの筐体作成
収穫ロボットの試作機の筐体は、アルミフレームで組んだ枠組みにロボットアームやマイコン、モーターなどを取り付けて作成しています。取り付けに必要なパーツの作成には、3Dプリンターを活用しています。3Dプリンターを使用することで、市販されていない複雑な形状のパーツを作成することが可能です。また、パーツの修正も容易に行えるため、3Dプリンターを効果的に活用することで、試作ロボットの開発サイクルを加速させることができます。
以下は、試作したロボット筐体を浜松の農園で動作実験させた際に撮影された写真です。ロボットアームにハサミを取り付けるためのパーツは3Dプリンターで作成しました。実際にみかんの茎を切って回収することにも成功しています。
以下は、試作したロボット筐体を浜松の農園で動作実験させた際に撮影された写真です。ロボットアームにハサミを取り付けるためのパーツは3Dプリンターで作成しました。実際にみかんの茎を切って回収することにも成功しています。

収穫ロボットの試作機

ロボットアームを用いたみかんの収穫
果実の検出を行うAIの作成
果実を収穫のためには、果実がどこにあるのかを検出し、その位置を正確に把握する必要があります。そこで、私たちはディープラーニングによる物体検出法の一つである「YOLO(You Only Look Once)」を用いて、果実の検出機能を開発中です。学習用のデータセットには、農園で撮影したみかんの写真をアノテーションしたものを使用しています。
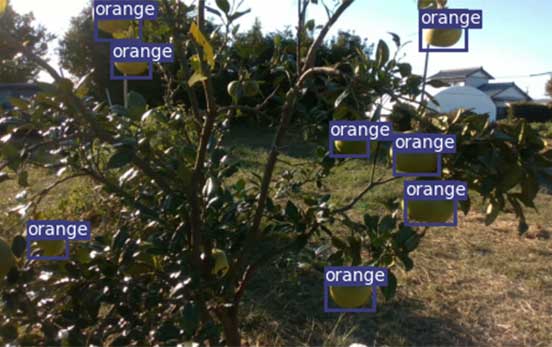
みかんの検出
検出した果実の位置情報は、ステレオカメラやLiDARから収集された点群データを利用して取得します。この位置情報は、ロボットアームを制御するノードに共有され、ロボットアームの位置制御に用いれらます。
農園の状況をデータ化するセンシングシステム
ロボットを使った収穫作業や農園の管理を行うためには、農園の状況をデータ化することが有効と考えられています。その有効性を実証するために、さまざまなセンサーを用いて取得した農園のデータを、通信基地局を介してやり取りするIoTシステムを開発しています。IoTシステムの技術開発の中から以下の三つの要素を紹介します。
GNSSを用いた農園のマッピング
作物の管理やロボットシステムの実現には、農園の地図情報が必要です。そこで、位置情報を活用して、農園の地図を作成するシステムの開発に取り組んでいます。将来的には、地図と各種デバイスの現在地を統合的に処理するシステムを目指します。
位置情報の取得には、GPS等のGNSS(Global Navigation Satellite System:全地球航法衛星システム)を利用しています。また、精度を上げるためにRTK(Real Time Kinematic)-GNSSという測位方法も活用しています。図に示す試作プログラムを開発し、精度や機能の確認のために浜松とベトナムの農園でテストを実施しました。テストでは農園内を実際に歩き、登録を行う対象物の近くで登録操作を行い、地図を作成しました。浜松の農園では高い精度のデータを取得できました。一方で、ベトナムの農園では、信号強度が低かったり、RTK-GNSSの利用ができなかったりしたため、十分な位置精度のデータを取得できないという課題が残りました。今後は、ベトナム等の国外での位置精度の向上や、GIS(Geographic Information System:地理情報システム)を活用した、統合的なIoTシステムの開発に取り組んでいきます。
位置情報の取得には、GPS等のGNSS(Global Navigation Satellite System:全地球航法衛星システム)を利用しています。また、精度を上げるためにRTK(Real Time Kinematic)-GNSSという測位方法も活用しています。図に示す試作プログラムを開発し、精度や機能の確認のために浜松とベトナムの農園でテストを実施しました。テストでは農園内を実際に歩き、登録を行う対象物の近くで登録操作を行い、地図を作成しました。浜松の農園では高い精度のデータを取得できました。一方で、ベトナムの農園では、信号強度が低かったり、RTK-GNSSの利用ができなかったりしたため、十分な位置精度のデータを取得できないという課題が残りました。今後は、ベトナム等の国外での位置精度の向上や、GIS(Geographic Information System:地理情報システム)を活用した、統合的なIoTシステムの開発に取り組んでいきます。
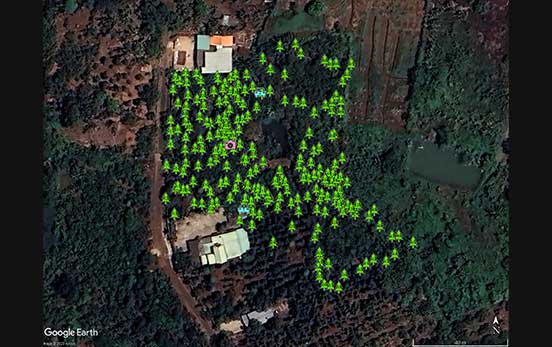
カカオの木のマッピング
自動撮影カメラモジュール
遠隔から作物の生育状況を確認できるように、定期的に写真撮影を行うシステムを作成しています。農園に電子機器を設置する際の大きな課題のひとつは、電源の確保です。多くの農園には電源が供給されていないため、モバイルバッテリーや電池等で長期間運用できる省電力なモジュールを開発する必要があります。さらに、屋外に設置するため、防水などの耐候性にも配慮する必要があります。このような条件を満たすカメラモジュールの開発を進めており、試作品をベトナムのカカオ農園に設置し、現在稼働中です。


カカオの木を定期撮影するカメラモジュール
土壌センサーシステム
浜松の農園にあるミカンの木の土壌の状態を測定する土壌センサーシステムを開発し、現地に設置して試験運用を実施しています。土壌の状態から価値のある情報を得る保証はありませんが、まずはデータ化して分析することが、デジタルトランスフォーメーション(DX)に関わる研究開発では重要なマインドであると考え、チャレンジしています。開発する土壌センサーシステムは、土壌のデータを定期的に取得し、クラウド上のデータベースサーバーに蓄積するシステムです。Qinlorgon社のセンサーを用いて、土壌温度や土壌湿度、土壌導電率といった土壌データを取得しています。センサー動作の制御にはRaspberry Pi Zeroを使用しています。
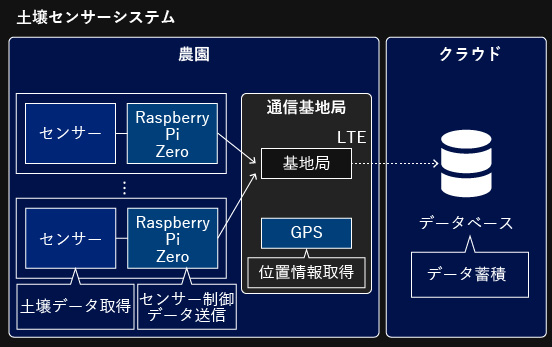
土壌センサーシステムの構成図
センサーからの通信
使用しているセンサーとの通信には、RS485と呼ばれるシリアル通信の規格を用います。Raspberry Pi Zeroとセンサーとの間に規格変換用のドライバーを挟み、GPIOからのUART通信でセンサーと通信できるようにしています。また、センサーからのデータ取得の制御はPythonプログラムで実行しています。電源
屋外に設置するIoTシステムでは、電源の確保が重要な課題です。屋外では、屋内のようにコンセントから電力を得ることができず、たとえソーラーパネルを設置してもIoTデバイスまで電源ケーブルを引くことが難しいことが多々あります。土壌センサーシステムも同様の状況であったため、システムを低消費電力化した上でバッテリーで動作させる仕様としました。低消費電力化の対策の一つは、システム全体を間欠動作するようにしたことです。土壌の状態の測定は1日に数回程度で十分と判断し、6時間ごとに約5分間だけ駆動する機能を実装しました。この機能には、Indoor Corgi社のRaspberry Pi用電源管理モジュール「RPZ-PowerMGR」を使用しています。通信基地局
自動撮影カメラモジュールや土壌センサーシステムから取得したデータをクラウド上のデータベースに送信するために、浜松の農園に通信基地局を設置しました。この基地局は、ソーラーパネルからの電源供給、各センサーと通信するためのWiFiルーター、そしてインターネットを経由してクラウド上のサーバーと通信するためのLTE通信モジュールから構成されています。筐体は、強風による転倒を防ぐために、安全に強度設計しています。地面への打ち込みに加え、余裕を持った重量の重しを設置しています。この基地局は少なくとも1年以上にわたり、安定的に稼働させることができています。

通信基地局
当社ではここまでに紹介したように、スマート農業に関するさまざまな取り組みを行っています。今後も開発を続け、農業の効率化に貢献していきます。さらに、スマート農業プロジェクトで培ったロボットとIoTの技術を農業以外の分野にも応用し、お客さまに提供していきます。
ROSの表記について
ROS2の正式な表記は、間にスペースを入れた「ROS 2」です。ただし、日本語では可読性の観点からスペースなしで表記されることが多いため、本サイトでも「ROS2」としています。