モデルベース開発(MBD)でリニアモーターカーを開発
2023年12月14日
- モデルベース開発(MBD)
組み込みソフトウエアの複雑化・巨大化に伴い、オートモーティブ分野を中心にMBDを導入した開発が活発になっています。当社では、MBDの黎明期から技術の習得に励み、現在は事業として取り組んでいます。
また、研究開発の部門では、モーター単体の制御に対してMBDの全プロセス(MILS・RCP・コード生成・HILS)に対応できるようになりました。現在ではもう一歩進んで、より実践的な技術として磁力制御技術の習得を目指し、リニアモーターカーをMBDで開発することに取り組んでいます。
本稿では、リニアモーターカーの開発状況を紹介します。
また、研究開発の部門では、モーター単体の制御に対してMBDの全プロセス(MILS・RCP・コード生成・HILS)に対応できるようになりました。現在ではもう一歩進んで、より実践的な技術として磁力制御技術の習得を目指し、リニアモーターカーをMBDで開発することに取り組んでいます。
本稿では、リニアモーターカーの開発状況を紹介します。
リニアモーターの特徴とリニアモーターカーの動作原理
はじめに、リニアモーターの特徴とリニアモーターカーの動作原理を説明します。
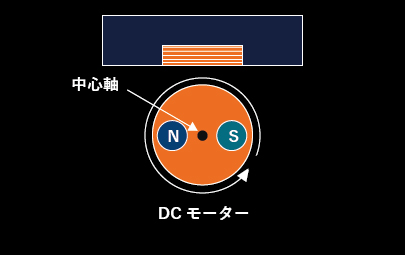
一般的なDCモーターは、電磁石(ステータ)への電流の大きさや向きを制御することで、内側にある永久磁石(ロータ)を回転させることで回転運動を生成します。一方で、リニアモーターは直線的な動力を発するのが特徴です。
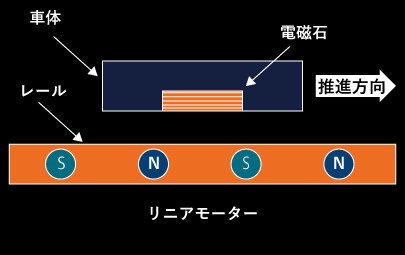
リニアモーターでは、DCモーターの内側にある永久磁石を直線的に引き伸ばし、N極とS極が交互に直線状に配置されます。また、ステータである電磁石を車体側に搭載して、電磁石へ流す電流の大きさと向きによって磁界を発生させて推進力を得ます。このリニアモーターを用いて、進行方向に加速および減速する車両のことをリニアモーターカーと呼びます。
一般的なDCモーターは、電磁石(ステータ)への電流の大きさや向きを制御することで、内側にある永久磁石(ロータ)を回転させることで回転運動を生成します。一方で、リニアモーターは直線的な動力を発するのが特徴です。
リニアモーターでは、DCモーターの内側にある永久磁石を直線的に引き伸ばし、N極とS極が交互に直線状に配置されます。また、ステータである電磁石を車体側に搭載して、電磁石へ流す電流の大きさと向きによって磁界を発生させて推進力を得ます。このリニアモーターを用いて、進行方向に加速および減速する車両のことをリニアモーターカーと呼びます。
リニアモーターカーの車体とコースの製作、速度計測システムの開発と実機検証
本開発は、最初にリニアモーターカーの車体と車体が移動するコース(レール)を製作しました。その後、コントローラモデルとプラントモデルの作成を行っています。現在は、MILS結果と実機との比較を進めながら、実機とモデルの両方のブラッシュアップを実施しています。
まずは、製作したリニアモーターカーの車体とコースから紹介します。車体の筐体とコースは、当社所有の3Dプリンターを使って設計・製作しました。また、コースを走る車体の速度を計測するシステムも開発し、実機検証を行っています。
まずは、製作したリニアモーターカーの車体とコースから紹介します。車体の筐体とコースは、当社所有の3Dプリンターを使って設計・製作しました。また、コースを走る車体の速度を計測するシステムも開発し、実機検証を行っています。
リニアモーターカーの車体とコースの製作
車体
製作した車体と搭載部品を紹介します。
| 車体の詳細 | 表面:Arduinoと制御用の電子回路、電源 裏面:電磁石とホールセンサー、浮上用の永久磁石 ※スムーズにコースを走行できるようにローラーも搭載 |
|---|---|
| 動作原理 |
|
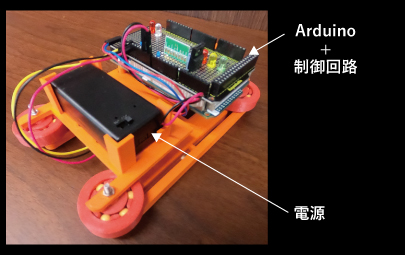
車体 表面
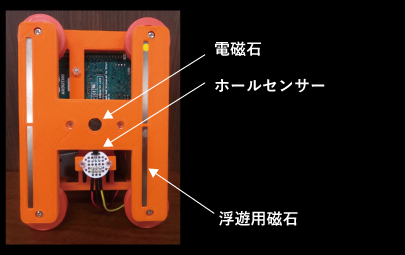
車体 裏面
コース
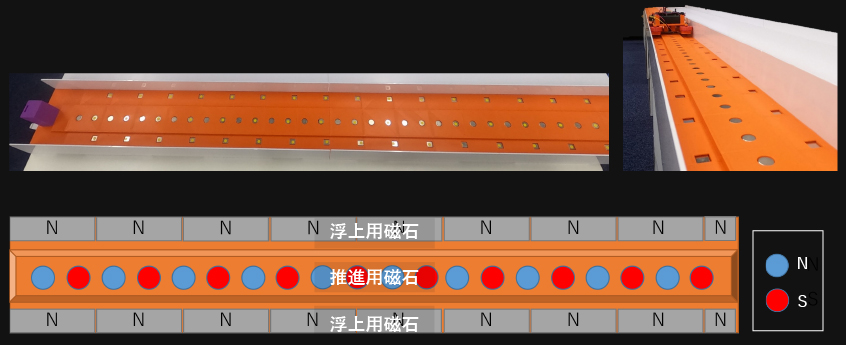
製作したコースには、推進用磁石と浮上用磁石を配置しています。
推進用磁石は、永久磁石を等間隔でN極・S極と交互になるよう配置し、両サイドには浮上用磁石を並べることで車体を浮上させています。
推進用磁石は、永久磁石を等間隔でN極・S極と交互になるよう配置し、両サイドには浮上用磁石を並べることで車体を浮上させています。
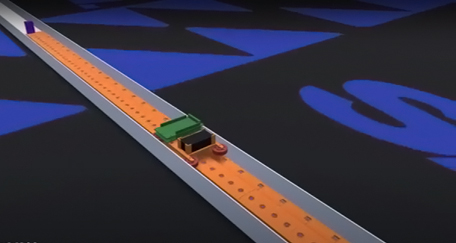
製作したコース(レール)
製作したリニアモーターカーが実際に走行している様子をご覧ください。
速度計測システムの開発と速度制御の精度を検証
車体の速度制御の精度を確認するために、広角Webカメラを使用して速度計測システムを開発しました。
コース全体を撮影できるように広角Webカメラを設置し、コースを走行する車体速度を測定します。
コース全体を撮影できるように広角Webカメラを設置し、コースを走行する車体速度を測定します。
測定の流れ
- 撮影を開始し、広角レンズによる歪みを補正する
- 物体認識アルゴリズムにより、動画内の動体を検知し、フレームの変化から速度を測定する
- 時間[s] と速度[m/s] で記録して、csv 形式で出力する
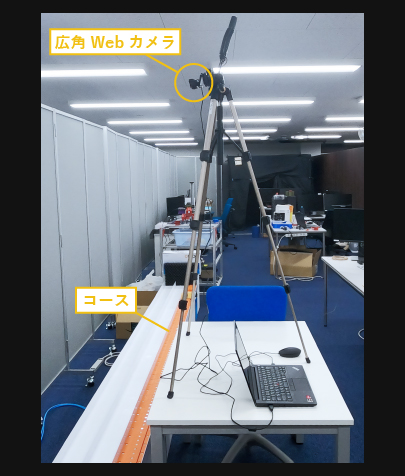
速度計測システム
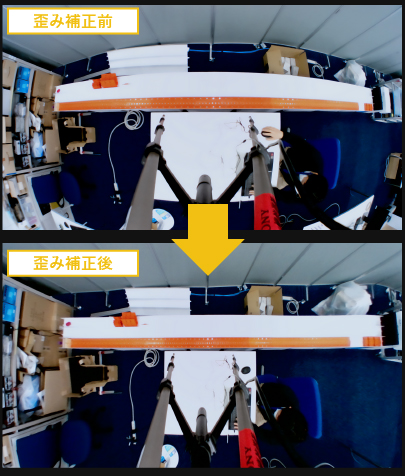
歪み補正の様子
時速1.5kmでの走行試験時の実測結果になります。
安定して目標速度に到達できるように、車体やコースの改良の検討を重ねています。
安定して目標速度に到達できるように、車体やコースの改良の検討を重ねています。
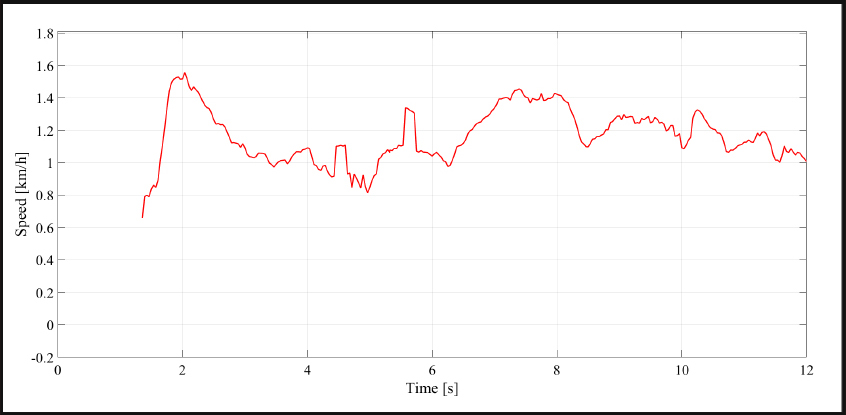
走行試験での実測結果
製作したリニアモータカーからコントローラモデルとプラントモデルを作成
作成したコントローラモデル、プラントモデルをそれぞれ紹介します。
プラントモデルの作成
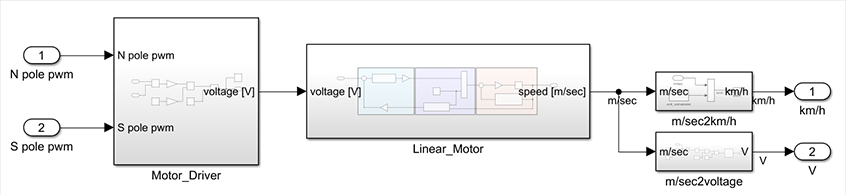
車体に搭載した電磁石とホールセンサー、およびコースであるリニアモーターをまとめて、プラントモデルとして作成しています。
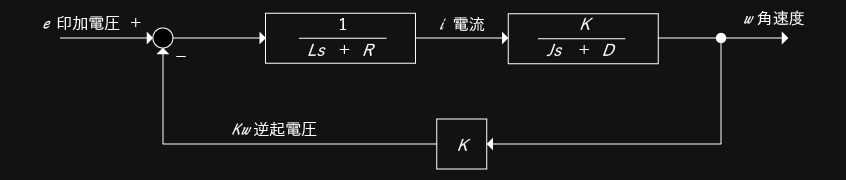
リニアモーターは直線系な駆動をしますが、制御ロジックはDCモーターと同様とみなすことができます。
そのため、リニアモーターはDCモーターと同じ数式モデルで表現することができます。
モーターにおける各パラメータは、計測装置を自作するなどして計測して、リニアモーターをモデル化しています。
リニアモーターは直線系な駆動をしますが、制御ロジックはDCモーターと同様とみなすことができます。
そのため、リニアモーターはDCモーターと同じ数式モデルで表現することができます。
モーターにおける各パラメータは、計測装置を自作するなどして計測して、リニアモーターをモデル化しています。
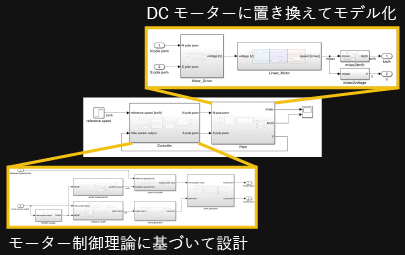
モデルの作成(プラント)
レールを直線系から回転系へ変換し、DCモーターとしてモデルを作成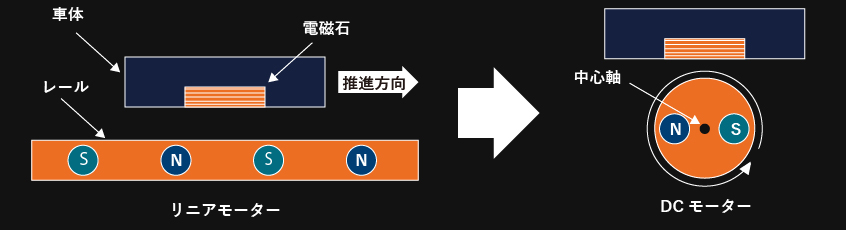
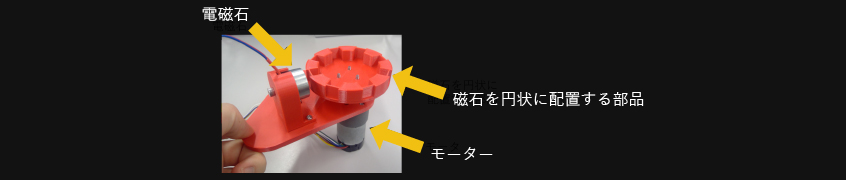
各パラメータは計測装置を自作するなどして計測
DCモーターブロック線図
逆起電力計測装置
プラントモデル
コントローラーモデルの作成(最大の推進力を得る磁力制御)
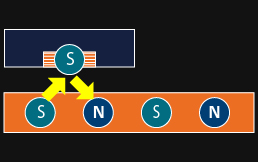
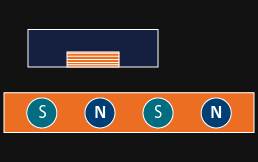
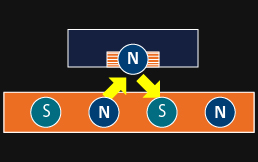
コントローラーにおいては、常に電磁石から推進力が発生するアルゴリズムを新たに開発しました。
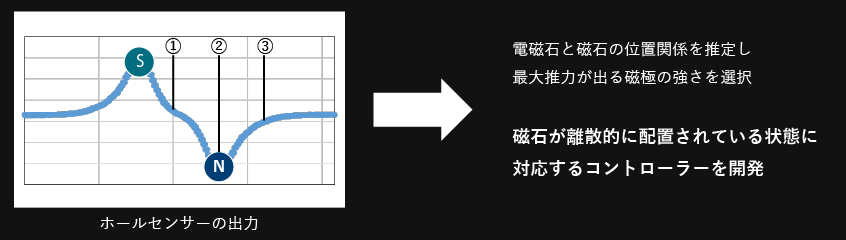
電磁石と磁石の位置関係を推定し、最大の推進力を得られる磁極と強さを選択します。
これにより、磁石が離散的に配置されている状態に対応するコントローラーを実現しました。
電磁石と磁石の位置関係を推定し、最大の推進力を得られる磁極と強さを選択します。
これにより、磁石が離散的に配置されている状態に対応するコントローラーを実現しました。
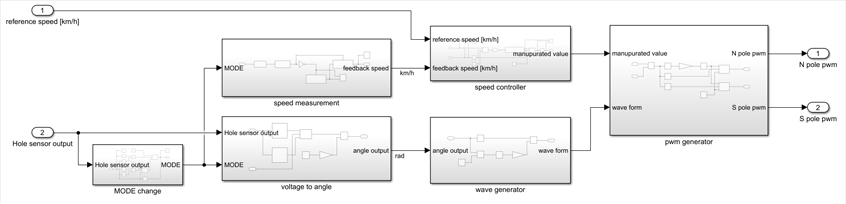
モデルの作成(コントローラー)
常に電磁石から推力が発生するアルゴリズムを作成
コントローラーモデルの作成
①
②
③
コントローラーモデル
MILS結果と実機の実測結果を比較し、実機に近いモデルへの改良
作成したコントローラモデルとプラントモデルを結合し、MILSを実施しました。
MILS結果と実機での実測結果を比較し、実機に近いモデルとなるよう改良を進めています。
MILS結果と実機での実測結果を比較し、実機に近いモデルとなるよう改良を進めています。
実機製作 → モデル作成で開発を進めているため、作成したモデルと実機との乖離がありましたが、モデルの改良を重ねることで、実機に近いモデルとなってきています。
今後も、MILS結果と実機での実測結果比較を続け、モデルの改良に取り組んでいきます。
今後も、MILS結果と実機での実測結果比較を続け、モデルの改良に取り組んでいきます。
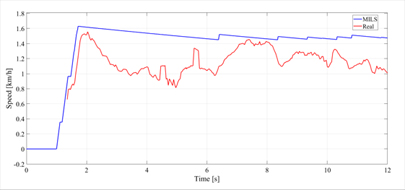
MILSと実機の比較(青:MILS 赤:実機)
より実践的なMBD技術の取得を目指し、当社の研究開発部門では、リニアモーターカーのMBDでの開発に挑戦しています。 実機製作からモデル作成、MILS、実機検証を通して、磁力制御技術の習得や実機に近いモデルを作成する技術も向上しています。 今後も車体とコースの改良の検討やモデルの精度を向上するなどブラッシュアップをしていき、将来的には以下のような取り組みを進めていきます。
- 3D物理シミュレーションの調査および実験を行い、実機が無くても実動作を模擬できる仕組みを構築する
- 近未来の移動/物流システムを見据え、横方向も含めた2次元移動可能なリニアモーターカーの作成を行う
Unity_3D物理シミュレーション