スマート農業向け「自動収穫ロボット」の開発
2023年07月31日
- 研究開発
今、世界中で進化を続けるスマート農業。その中で研究開発が進む「自動収穫ロボット」は農業に革命をもたらすでしょう。従来の手作業と比較して、自動収穫ロボットは収穫速度を上げて収穫量を増やし、かつ作業のコストと量を軽減します。さらに、精密なセンサーを組み合わせることで、収穫物の品質向上にもつながります。
当社での自動収穫ロボットの研究開発は、以前関連記事でお伝えした「自律走行機能」から、「自動収穫機能」の開発フェーズに入っています。
本稿では、現在進んでいる、自動収穫機能の研究開発の状況をご紹介します。
当社での自動収穫ロボットの研究開発は、以前関連記事でお伝えした「自律走行機能」から、「自動収穫機能」の開発フェーズに入っています。
本稿では、現在進んでいる、自動収穫機能の研究開発の状況をご紹介します。
果実の摘み取り機能
自動収穫機能は、果実の認識 → 果実の摘み取り → 果実の格納 といった一連の作業で構成されます。
ここでは、「果実の摘み取り機能」の開発状況をご紹介します。
ここでは、「果実の摘み取り機能」の開発状況をご紹介します。
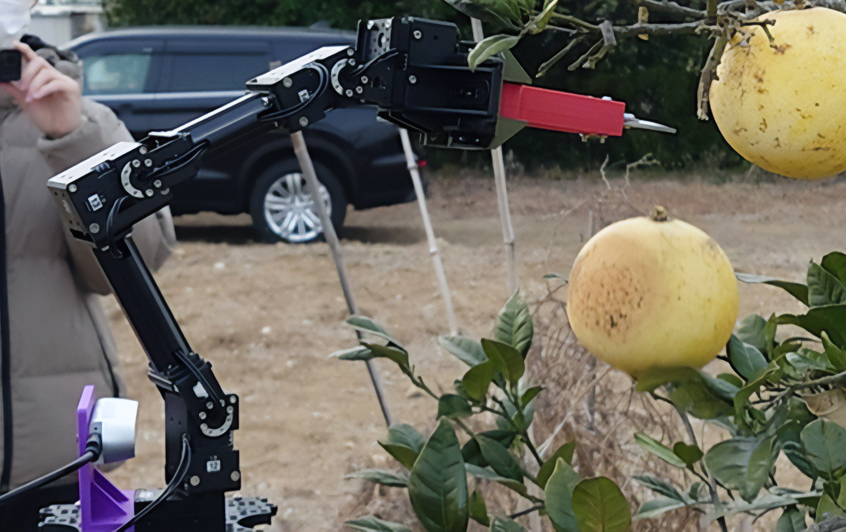
実験場で、枝になっている果実をハサミで摘み取る実験の様子です。
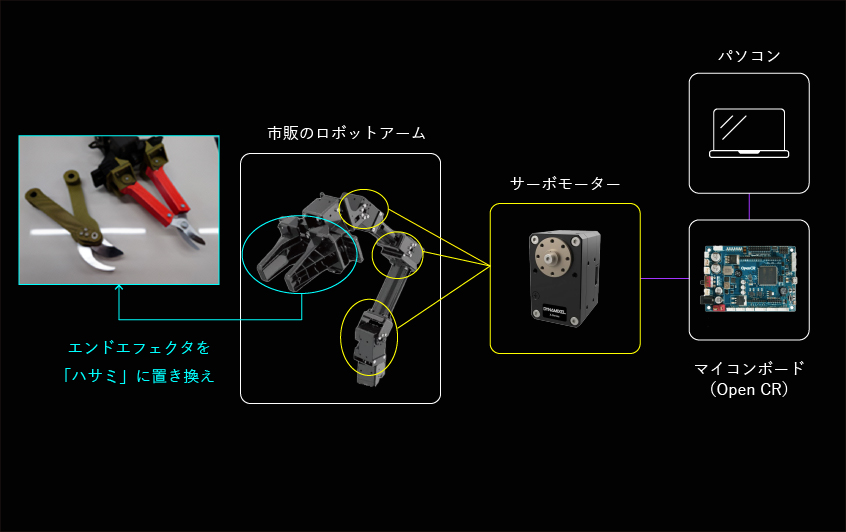
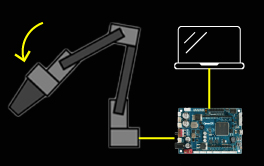
下図は、果実の摘み取り機能の仕組みです。
ロボットアームの各サーボモータを、マイコンとパソコンで制御します。
ロボットアームの各サーボモータを、マイコンとパソコンで制御します。
果実の摘み取り機能の開発テーマは、大きく次の二つです。
- 摘み取りのエンドエフェクタ開発
- ロボットアーム制御のソフトウエア開発
摘み取りのエンドエフェクタ開発
ロボットアームのエンドエフェクタ開発では、当社で柔軟性と正確性を備えた高度なハサミを開発しています。これにより、果実を傷つけることなく、効率的に摘み取ることが可能となります。
- FreeCADで設計

- 3Dプリンターで製作
- ロボットアームに取り付け
試作3号機
密度や構造の調整で、枝や割り箸の切断に成功
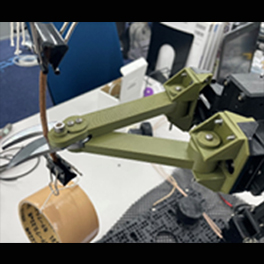
試作4号機
ハサミの強度を上げることで(右)、小さいトルクでも切断が可能になった
ロボットアーム制御のソフトウエア開発
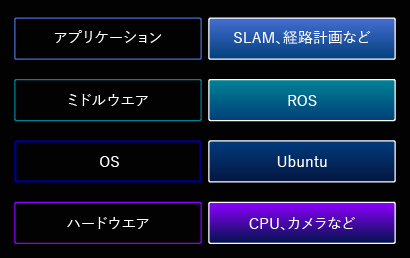
ROS(ROS2)を利用して、ロボットアーム制御用のSDKをベースにプログラムを作成します。
ROS(Robot Operating System)は、ロボットシステム開発のための共通ライブラリとツール群を提供するオープンソースのフレームワークです。名称にOSとついていますが、正確にはミドルウエアで、右図の例のようにWindowsやUbuntu等のOSの上にROSがのっています。
ロボットアーム制御用のパッケージを用いて、ロボットアームを動かす
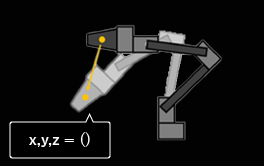
- 位置指定プログラム
移動後の座標を指定
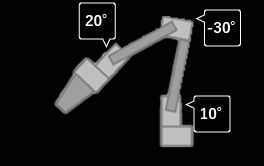
- 制御プログラム
モーターの角度を計算
- DynamixelSDK
モーターに回転指令を送る
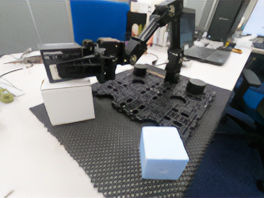
ロボットアームで箱を移動させることに成功
- 青いキューブの上
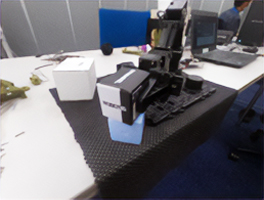
- ホームポジション
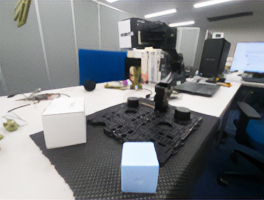
- 白いキューブの上
エンドエフェクタの制御部分の開発
(≒最大トルク量の調整)
設定ファイルからトルク(電流)の最大値を変更し、パワーを上げた
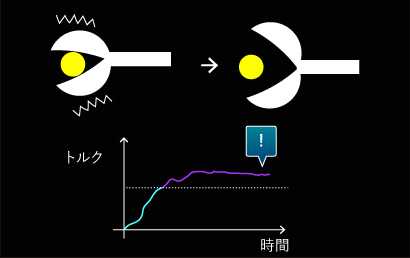
安全機構の追加
事故を防ぐため、強いトルクがかかり続けるとグリッパーが開くようにした
これらの研究成果を収穫機能のプロトタイプとして実験場に持ち込み、上述の果実の摘み取り実験を行い、満足のいく結果を得ることができました。
果実の認識と格納
果実の認識機能と格納機能は次の研究テーマですが、現在試行している一部をご紹介します。
果実の認識機能
認識すべき情報:果実の位置(3次元)、果実の大きさ
候補のセンサー:ステレオカメラ、LiDAR、単眼カメラ(複数の視点で撮影)
候補のアルゴリズム:RANSAC、SfM(Structure From Motion)、YOLO、等
候補のセンサー:ステレオカメラ、LiDAR、単眼カメラ(複数の視点で撮影)
候補のアルゴリズム:RANSAC、SfM(Structure From Motion)、YOLO、等
果実の認識機能の施行例
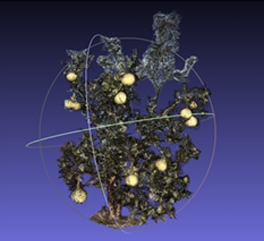
SfMで作成したみかんの成木
(点群)
(点群)

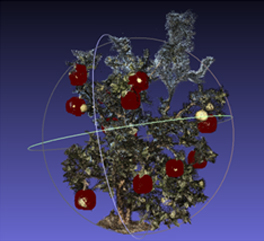
RANSACによる球面検出の結果
(赤部分が検出された部分)
(赤部分が検出された部分)
自動収穫ロボットは、果実の位置と熟度を認識するために、高度なカメラとセンサーを使用します。これらのセンサーは、色、サイズ、形状など、果実のさまざまな属性を分析します。
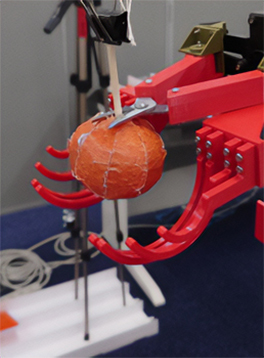
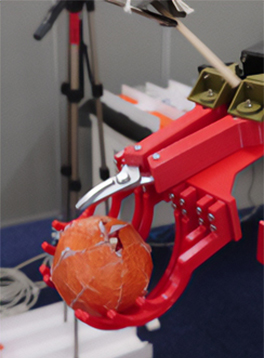
果実の格納機能
格納機能をコンパクトでかつ確実性の高いものにするために「掴む」機構を試行中です。
摘み取った果実は、ロボット内の容器に自動で格納されます。このプロセスでは、果実が適切に配置され、損傷を防ぐために優れた機構が必要になります。
摘み取った果実は、ロボット内の容器に自動で格納されます。このプロセスでは、果実が適切に配置され、損傷を防ぐために優れた機構が必要になります。
いよいよスマート農業が事業化に向けたフェーズに入ってきます。近い将来、ここで紹介した研究・開発が、世界の農園で活躍することになるでしょう。
これらの研究成果を収穫機能のプロトタイプとして実験場に持ち込み、上述の果実の摘み取り実験を行い、満足のいく結果を得ることができました。自動収穫ロボットは、現代の農業に革命をもたらす可能性を秘めています。当社は、この分野でのイノベーションをリードするために、技術の進化とコミュニティーとの連携に注力しています。
先日、台湾で開催された「COMPUTEX TAIPEI 2023」 の当社ブースで「カカオ農園でのスマート農業の取り組み」をご紹介しました。自動収穫ロボットは、開発途上国を含む世界各地で大きな影響を及ぼす可能性があります。これらの国々では、人手不足や作業員の安全、作物の品質管理が課題となっています。当社の技術が世界中の農業を支援し、食料供給の安定と持続可能性に寄与することを期待しています。
これらの研究成果を収穫機能のプロトタイプとして実験場に持ち込み、上述の果実の摘み取り実験を行い、満足のいく結果を得ることができました。自動収穫ロボットは、現代の農業に革命をもたらす可能性を秘めています。当社は、この分野でのイノベーションをリードするために、技術の進化とコミュニティーとの連携に注力しています。
先日、台湾で開催された「COMPUTEX TAIPEI 2023」 の当社ブースで「カカオ農園でのスマート農業の取り組み」をご紹介しました。自動収穫ロボットは、開発途上国を含む世界各地で大きな影響を及ぼす可能性があります。これらの国々では、人手不足や作業員の安全、作物の品質管理が課題となっています。当社の技術が世界中の農業を支援し、食料供給の安定と持続可能性に寄与することを期待しています。
ROSの表記について
ROS2の正式な表記は、間にスペースを入れた「ROS 2」です。ただし、日本語では可読性の観点からスペースなしで表記されることが多いため、本サイトでも「ROS2」としています。