【体験版ロボットシナリオシミュレータ】最新アップデート情報:スマート農業をシミュレーション!収穫ロボットによる自動収穫シミュレーション機能追加
2025年03月18日
- ロボットシナリオシミュレータ
いつも当社の体験版ロボットシナリオシミュレータをご利用いただき、誠にありがとうございます。 この度、体験版ロボットシナリオシミュレータにスマート農業向けの自動収穫シミュレーション機能を追加しました。 今回は、新しく追加した収穫ロボットと自動収穫シミュレーションについてご紹介します。
スマート農業をシミュレーション!体験版ロボットシナリオシミュレータの新機能紹介
今回のアップデートでは、以下の機能が追加されました。
農園と収穫ロボットを3D空間に再現
当社が取り組む「スマート農業プロジェクトの実験場」として利用している農園を再現し、同プロジェクトにて当社が製作した収穫ロボットをベースに3Dモデル化しました。農園の凹凸具合など地面の調整だけでなく、収穫ロボットのタイヤの扁平率などを変更してシミュレーションできます。タイヤの扁平率を変更してシミュレーションできることが当シミュレータの強みであり、他にない収穫シミュレーションを体験ください。
自律走行と自動収穫のシミュレーション
スタート地点と回収地点、収穫するみかんの木の本数を選択することで、自動収穫が始まります。自動収穫中は、障害物を避けるように経路を探索して自律走行を行います。みかんを1つ収穫するごとに最適な経路を探索しながら、自律走行と自動収穫を行う様子を体験できます。また、農園の地形状況や収穫ロボットのタイヤによって、収穫にかかる時間にも変化がみられるため、効率的な収穫計画などにも活用できます。
農園を仮想空間上に再現(3D農園)
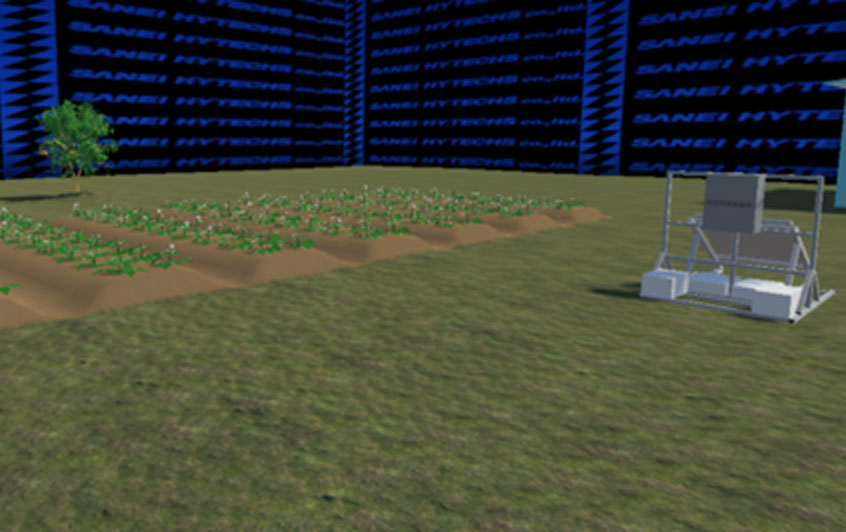
当社が取り組む「スマート農業プロジェクト」の実験場として利用している農園を再現しました(3D農園)。
3D農園には、じゃがいも畑とみかんの木を5本配置しました。みかんの木から、みかんを収穫できます。
3D農園には、じゃがいも畑とみかんの木を5本配置しました。みかんの木から、みかんを収穫できます。

浜松市内の農園(写真)
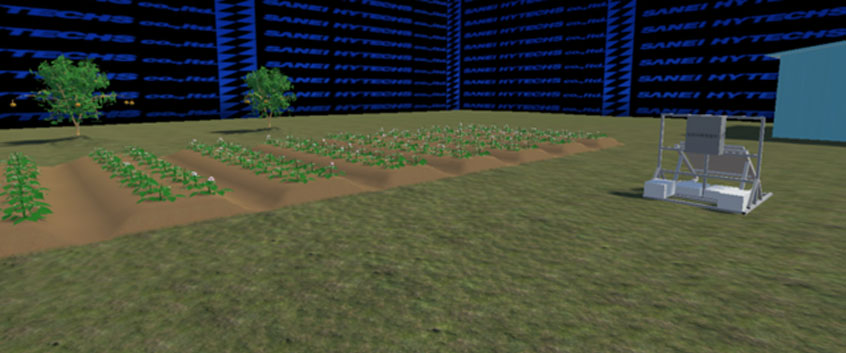
3D農園
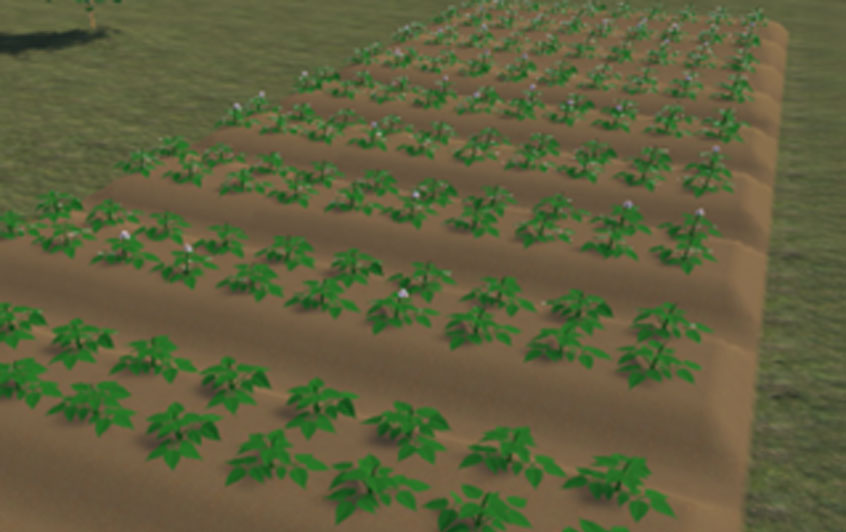
3D農園 じゃがいも畑
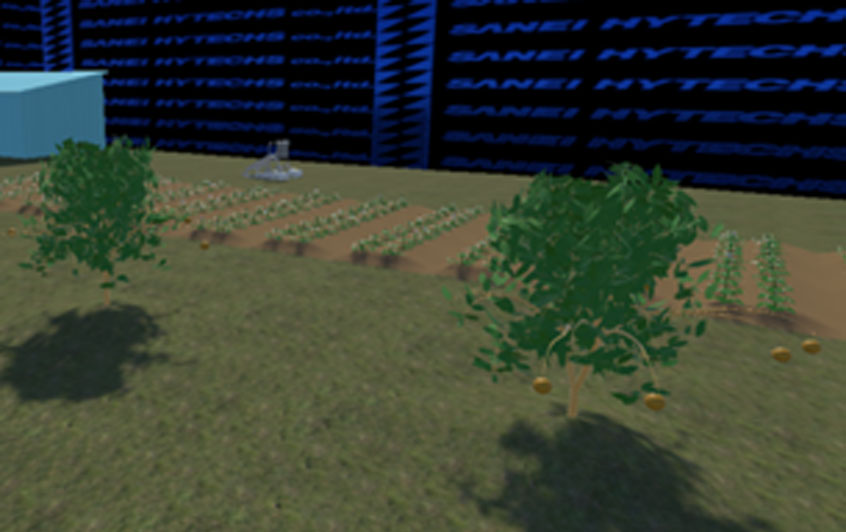
3D農園 みかんの木
勾配と凸凹設定
3D農園では、地面の凹凸と勾配を変更できます。 凹凸は3段階用意し、レベルが高いほど凹凸が大きくなります。 勾配は任意の値に変更でき、農園全体の傾斜を変更できます。 今回再現した実際の農園には、このような大きな凹凸や傾斜はありませんが、仮想空間だからこそできる再現によって、収穫ロボットの走行の安定性などを確認できます。
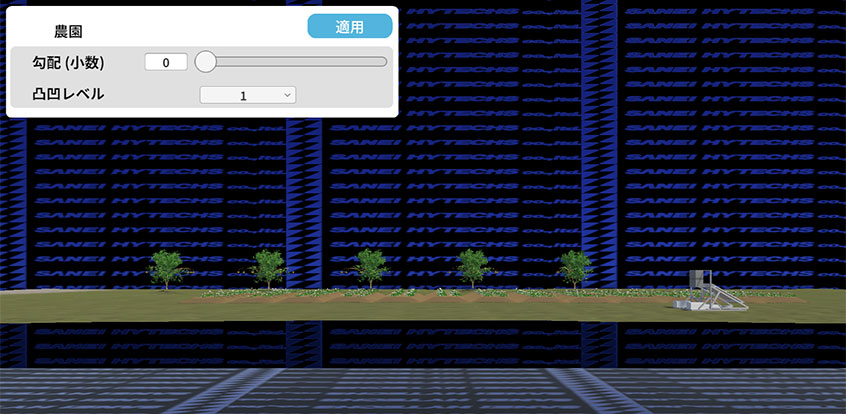
初期設定(傾斜なし/凸凹レベル1)
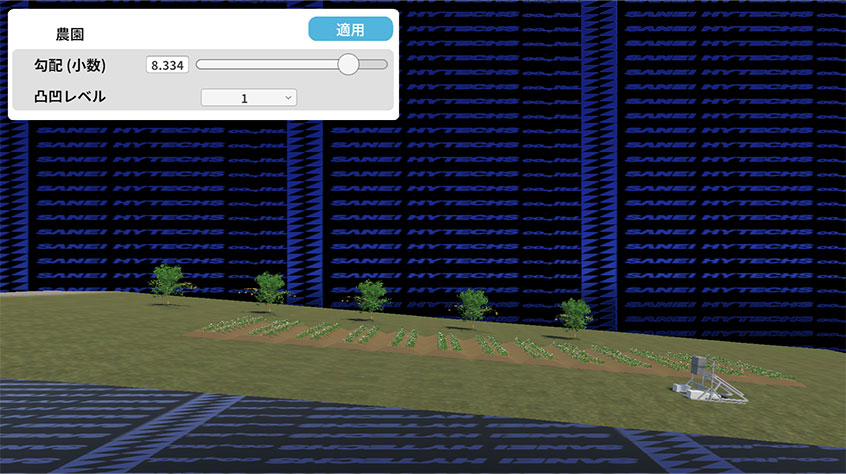
勾配設定後(傾斜あり)
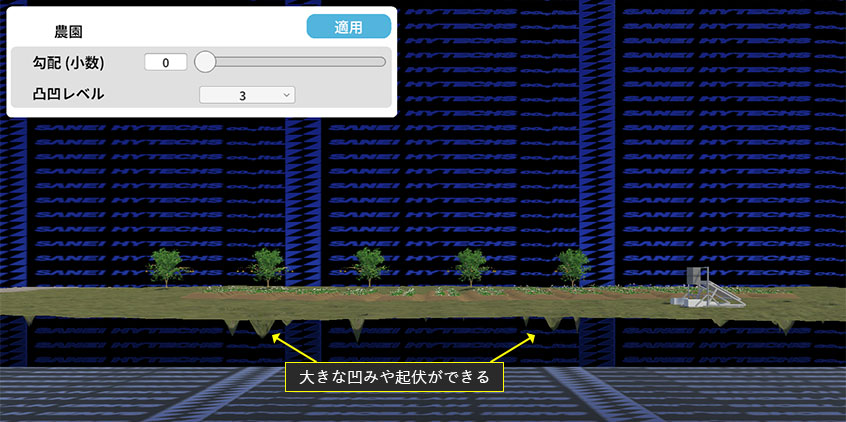
凹凸設定後(凸凹レベル3)
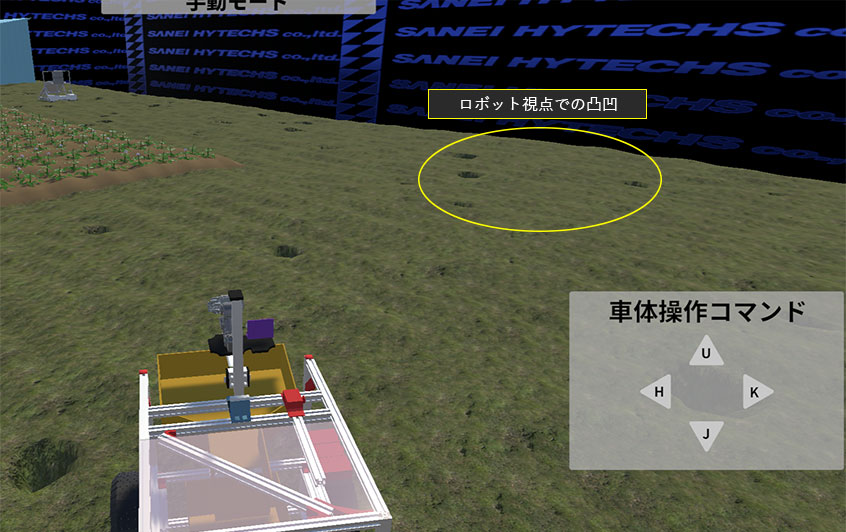
凸凹設定後(凸凹レベル3)ロボット視点
収穫ロボットを3Dモデル化
当社が取り組む「スマート農業プロジェクト」で開発した収穫ロボットを3Dモデル化しました。収穫用ロボットアームやカメラを実装しています。

収穫ロボット(実機)
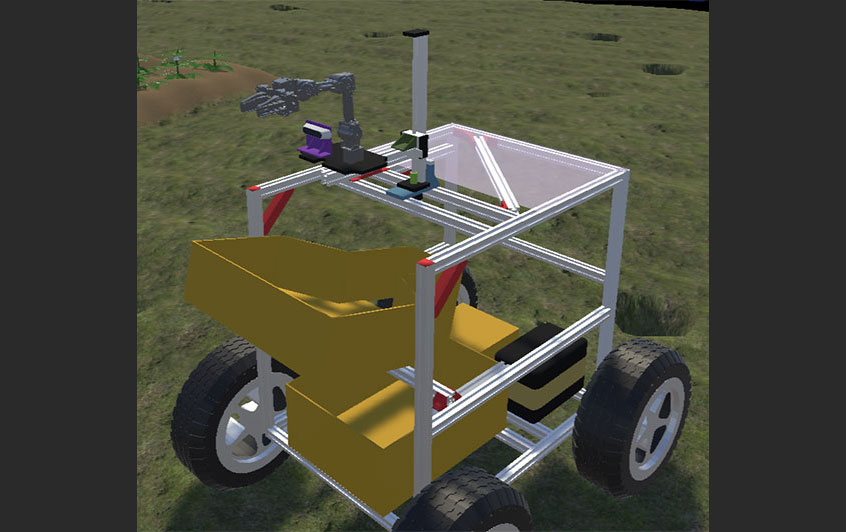
収穫ロボット(3Dモデル)
| カメラ |
|
|---|---|
| ロボットアーム |
|
| タイヤ |
|
タイヤの扁平率や空気圧などを変更してシミュレーションを行えます
収穫ロボットのタイヤは、タイヤの扁平率・空気圧とホイールの幅と径の4カ所を変更できます。
ロボットが走行する地形だけでなく、タイヤやホイールの条件も変更してシミュレーションできることが当シミュレータだけの強みです。
ロボットが走行する地形だけでなく、タイヤやホイールの条件も変更してシミュレーションできることが当シミュレータだけの強みです。

タイヤの設定変更(初期設定)
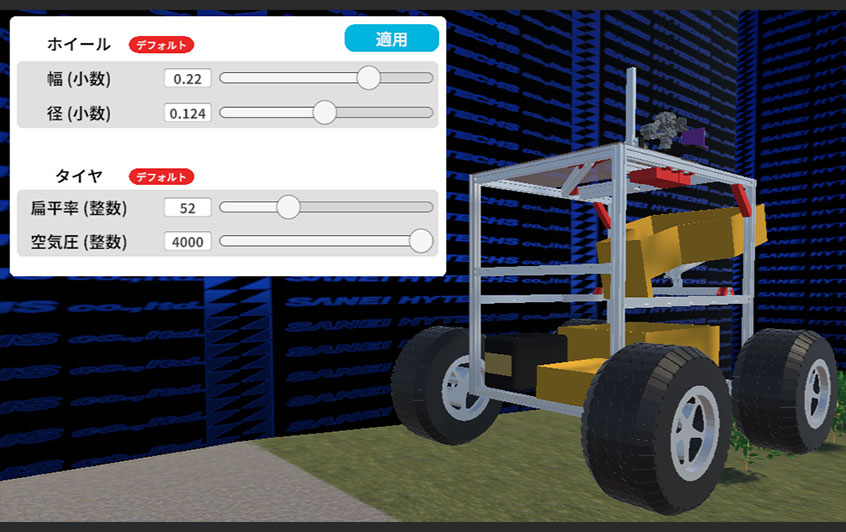
タイヤの設定変更(設定変更後)
収穫ロボットによる農園内の自律走行
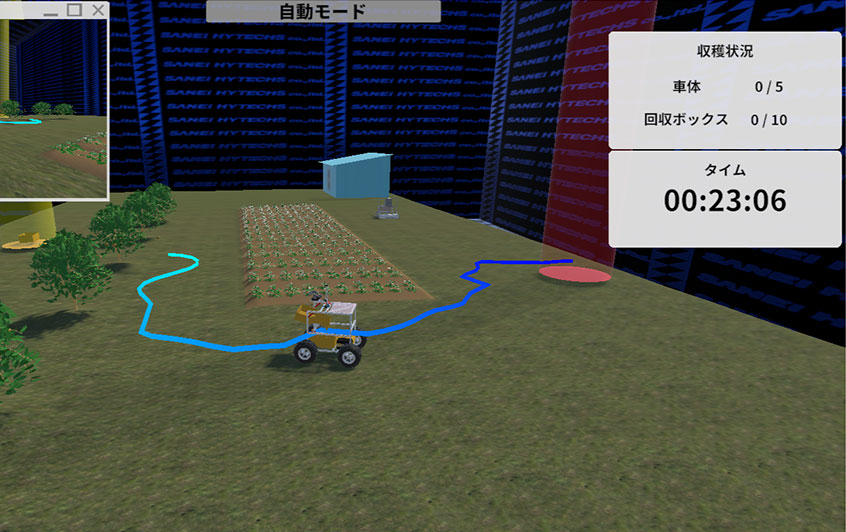
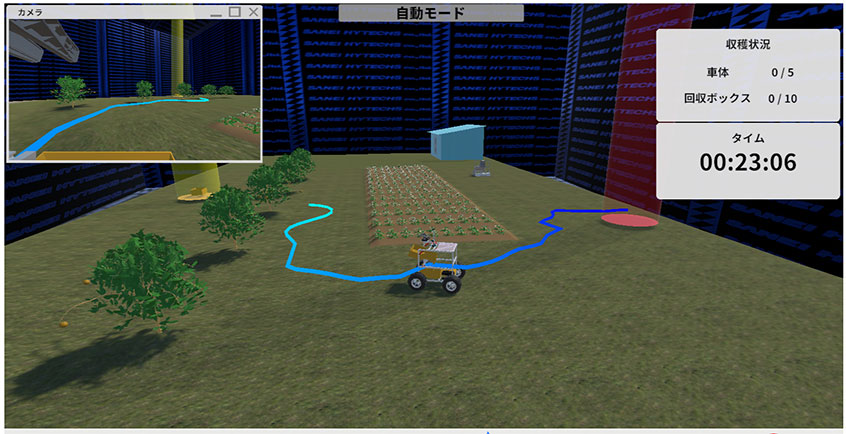
今回の体験版では、みかんの木や畑の位置など地形データを事前にシミュレータ内で把握しています。収穫ロボットは、畑の中やみかんの木を障害物として、ぶつからないように自律走行を行います。自動収穫中は、みかんを1つ収穫するごとに次のみかんへの最適な経路を探索して、収穫をしていきます。経路探索には、論文などで公開されている複数のアルゴリズムを当社で組み合わせて実現しています。
自動経路探索
収穫ロボットによるみかんの自動収穫
みかんの木1本から果実を5個収穫するごとに、回収地点に向かい、収穫したみかんをおろします。指定したみかんの木において、すべての収穫が終わるまで、自動で収穫と回収を続けます。
収穫ロボット視点のカメラでは、みかんとの距離を表示していて、収穫可能な距離になると数値の文字色が赤色から白色に変化します。また、自動収穫がスタートすると、収穫完了までにかかる時間を計測して画面の右側に表示しています。農地の凹凸や勾配、タイヤの条件によって収穫にかかる時間が変わりますので、ぜひいろいろな条件でシミュレーションを実行してみてください。
収穫ロボット視点のカメラでは、みかんとの距離を表示していて、収穫可能な距離になると数値の文字色が赤色から白色に変化します。また、自動収穫がスタートすると、収穫完了までにかかる時間を計測して画面の右側に表示しています。農地の凹凸や勾配、タイヤの条件によって収穫にかかる時間が変わりますので、ぜひいろいろな条件でシミュレーションを実行してみてください。
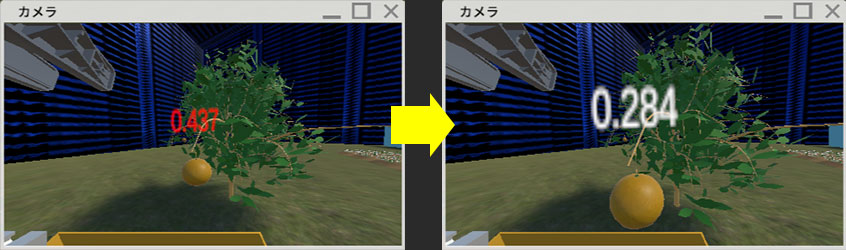
収穫時の距離の変化
体験版に新しく追加した収穫ロボットでのシミュレーション機能を紹介しました。農地の凹凸と勾配といった土地の条件だけでなく、収穫ロボットのタイヤ条件も変更してシミュレーションできることが当シミュレータの強みです。また、自律走行のための経路探索には、既存のアルゴリズムを当社で組み合わせて実装しました。ぜひ、土地・タイヤの条件をいろいろ変更して、自律走行と自動収穫を行う様子を体験してください。
本シミュレータの製品版を2024年度内にリリース予定です。製品版では、自動収穫シミュレーションとドローン飛行シミュレーションの機能拡充に加え、メタバース機能によるコミュニケーション機能など、さまざまな機能の追加実装を段階的に進めていく予定です。製品版の公開まで、いま少しお待ちください。今後も本サイトで情報を公開してまいりますので、お楽しみに。
本シミュレータの製品版を2024年度内にリリース予定です。製品版では、自動収穫シミュレーションとドローン飛行シミュレーションの機能拡充に加え、メタバース機能によるコミュニケーション機能など、さまざまな機能の追加実装を段階的に進めていく予定です。製品版の公開まで、いま少しお待ちください。今後も本サイトで情報を公開してまいりますので、お楽しみに。